L’étude des moteurs hydrauliques se présente toujours comme une série de monographies. La mécanique, s’emparant du domaine particulier créé par chaque terme de cette série, étudie séparément chaque type de moteur, le plus vieux comme le plus moderne, détermine ses meilleures conditions de marche, sert de guide pour sa construction. Mais le champ d’action de la mécanique, si grand qu’il soit, est limité par les divisions mêmes du sujet qu’elle traite. Et il peut être intéressant, au point de vue de la science des machines, d’essayer, par un exposé historique du développement des moteurs hydrauliques, de dégager l’allure générale de l’évolution qu’ils ont suivie, de rechercher en un mot, derrière les calculs mathématiques, s’il n’y a pas une pensée mécanique profonde, une sensibilité spéciale à l’ingénieur, susceptibles d’avoir déterminé leur transformation au cours des âges.
Il est nécessaire avant tout de se rendre compte de ce qu’on peut appeler le problème général des moteurs hydrauliques. Chacun sait ce que l’on appelle une chute d’eau, Mais cette dénomination, si nette dans le cas d’une chute tangible, perd sa valeur ordinaire, dans le cas, hydrauliquement aussi important où, la chute étant très faible, détermine simplement le mouvement de l’eau, dans le lit d’une rivière par exemple. Il y a chute cependant, au même titre que dans le cas d’une brusque différence de niveau ; et le problème prend dès lors une allure générale, d’un extrême intérêt.
L’eau, sous l’influence de la chu le, forme une veine liquide en mouvement. Le but du moteur est, par son interposition ’dans la veine, de former avec celle-ci un accouplement cinématique. Cet accouplement modifie ou la direction, ou la rapidité du mouvement de la veine et cette modification, transmise au moteur, seconde partie du couple, détermine son mouvement.
La transformation générale subie par les moteurs a eu pour but, inconnu peut-être de leurs inventeurs, de réaliser, d’une façon de plus en plus correcte, cet accouplement, et de l’étendre au cas de veines très variables de forme’ et de mouvement. C’est ce que nous voulons rapidement faire ressortir ci-après.
Le premier moteur hydraulique s’est vraisemblablement montré sous deux aspects très différents en apparence, mais semblables au point de vue précédent : la roue pendante et le rouet de Bélidor.
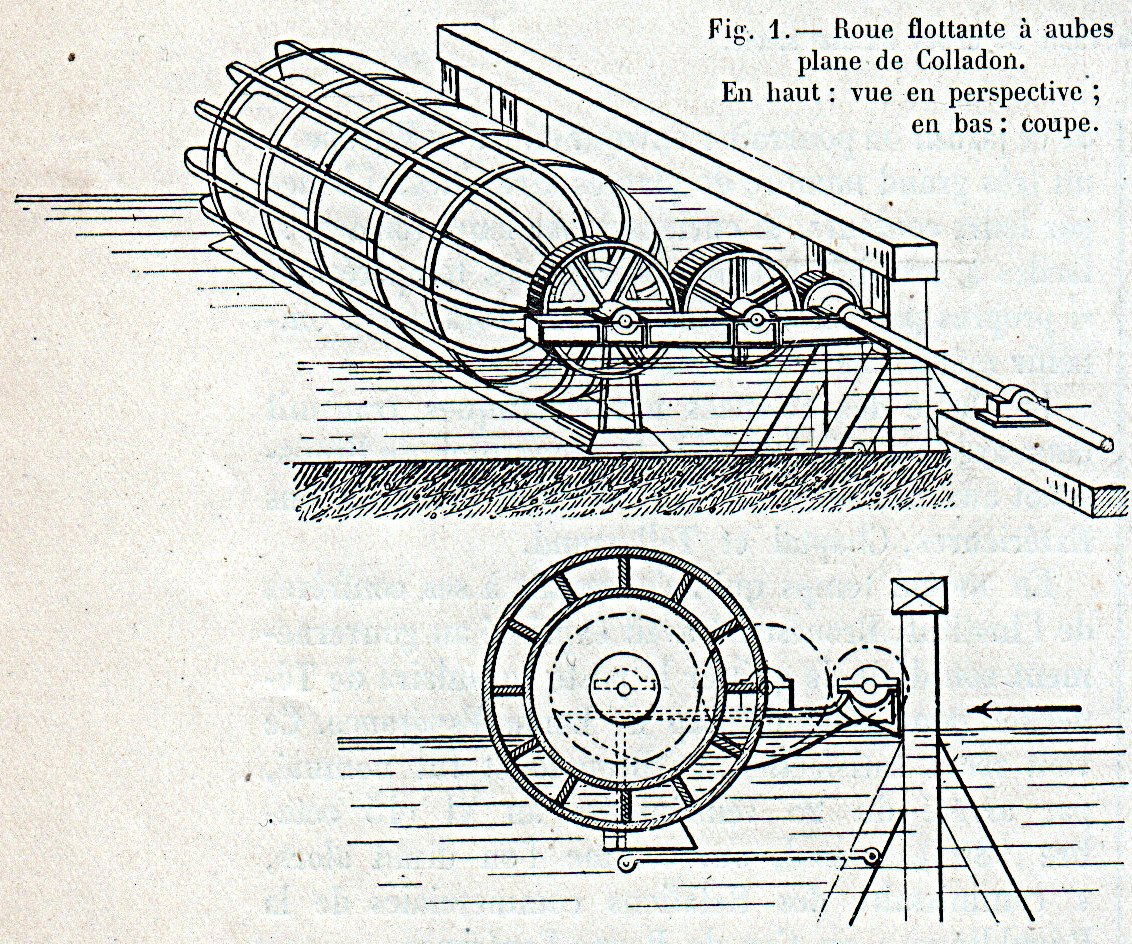
La première, représentée (fig. 1), remonte à une antiquité assez lointaine. Les traditions qui nous sont parvenues sur la forme des roues de ce genre, employées autrefois en Mésopotamie, montrent une concordance merveilleuse entre cette forme et celle des roues encore en usage dans ce pays. Les anciennes roues étaient entièrement en bois. Aujourd’hui encore ces roues sont employées en Chine. A l’exception de l’axe, qui est en bois, elles se composent entièrement de jonc tressé et de bambous, sans l’emploi d’aucun métal. Ces roues, employées sur les rivières, plongent dans l’eau par leur partie inférieure et le mouvement se communique par l’accouplement eau-palettes.
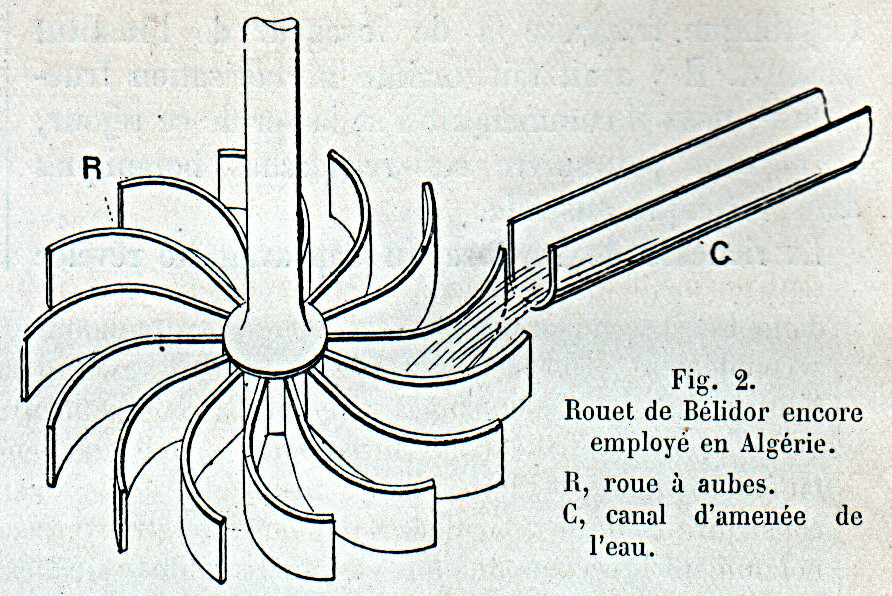
Les rouets (représentés fig. 2) dérivent directement des vieilles roues à cuillère qui datent de plusieurs siècles. Bélidor, au XVIIIe siècle, dans son architecture hydraulique, puis d’Aubuisson au commencement du XIXe constatent que leur emploi se fait uniquement dans les moulins à blé. Un axe vertical soutient des palettes en forme de cuillères. Chaque palette venant à son tour s’accoupler avec la veine liquide sortant d’un ajutage C, il en résulte un mouvement de rotation.
Dans les deux cas, l’accouplement cinématique est forcément imparfait, l’eau n’étant guidée que d’un seul côté. Le rendement en est donc mauvais. L’état peu avancé de la mécanique industrielle ne permettait pas non plus de construire des roues de ces systèmes réalisant un meilleur accouplement. Elles furent donc abandonnées et remplacées par des roues hydrauliques à accouplement plus facile, et que nous allons examiner. Mais un fait est cependant à retenir. La roue pendante et le rouet de Bélidor ne furent abandonnés momentanément que par l’impossibilité matérielle de les bien construire et de les calculer. Mais nous les retrouverons, notamment le second, une fois ces impossibilités vaincues, sous forme de turbines mixtes et de roues Pelton.
On vit alors paraître à leur suite les roues hydrauliques en dessus primitives, dont la disposition générale est bien connue. Les formes particulières sont déterminées par les nécessités d’installations diverses. Mais l’accouplement est déjà meilleur. La difficulté, à la vérité, a été tournée, et dans l’impossibilité de réaliser un accouplement cinématique acceptable durant pour toute l’immersion de la roue, on a fait cet accouplement pour l’entrée de l’eau dans les aubes, la pesanteur étant chargée de faire ensuite tourner la roue [1]. La solution ainsi trouvée n’était pas scientifique et elle n’a ]lu se répandre, et durer encore actuellement, que par la simplicité même de construction et d’installation qu’elle permet d’atteindre.
Il y a toujours, dans une telle roue, la moitié des aubes vides, par suite inutiles et constituant un poids mort entraîné par le moteur. L’accouplement cesse, par le déversement des augets, avant le niveau d’aval, et, outre qu’il en résulte pour ces roues un rendement maximum de 0,60, la solution momentanée qu’elles donnaient ne pouvait satisfaire les hydrauliciens qui ont cherché autre chose. Les chutes qu’elles utilisaient étaient assez grandes (de 4 à 10 m.) et on les remplaça du premier coup par les turbines qui utilisent les mêmes chutes. Une évolution plus lente avait lieu en même temps pour les faibles chutes.
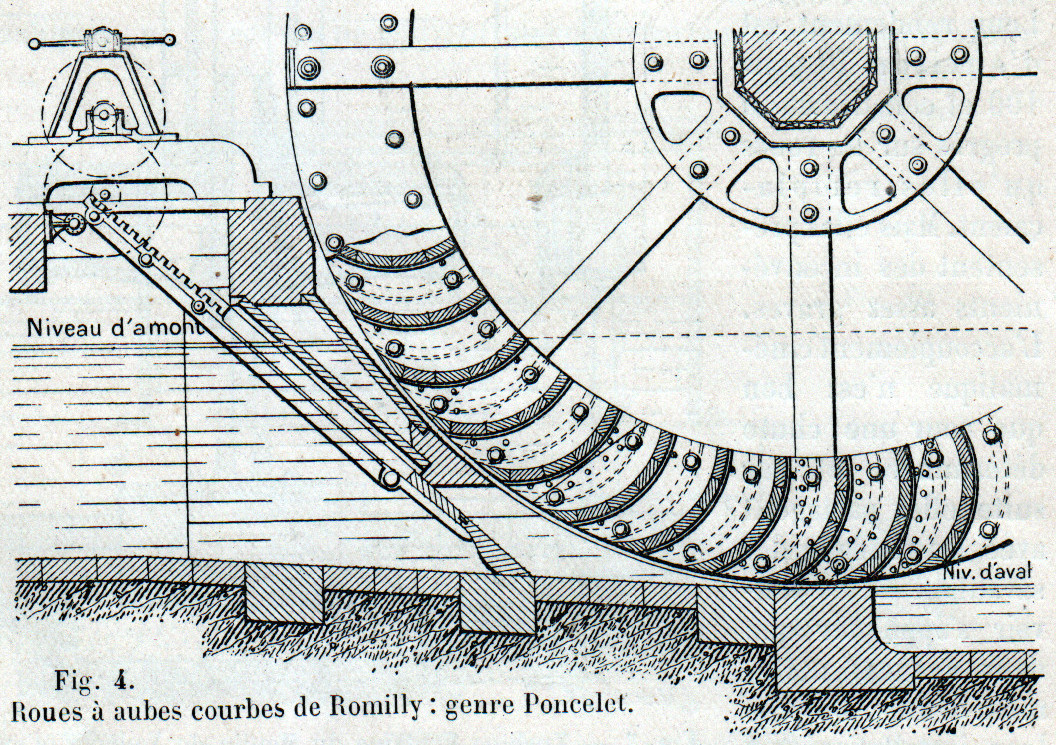
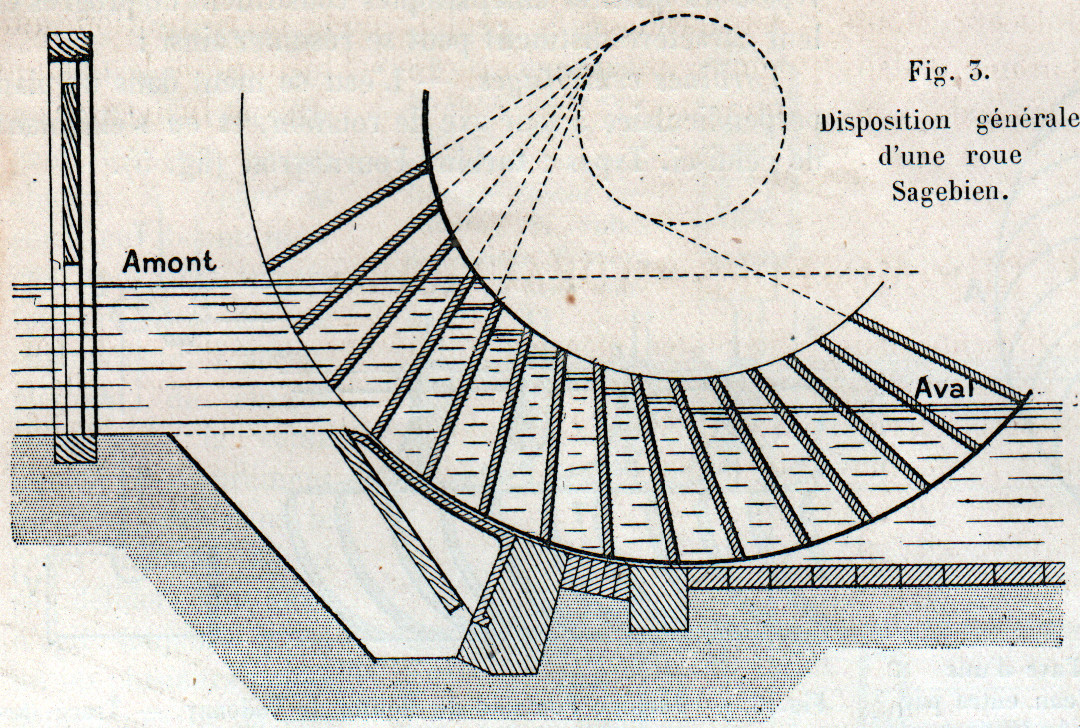
Dans ce dernier cas, la vitesse de l’eau étant faible, l’accouplement cinématique est plus facile à réaliser, les remous et pertes étant moins importants. Et la recherche de cette réalisation nous valut les roues de coté, presque parfaites, celle de Poncelet et celle de Sagebien en particulier. Nous donnons ci-dessous les schémas de ces deux roues. Dans la première (fig. 4), l’eau arrive avec une assez grande vitesse dans les aubes, monte sur celles-ci et les quitte en aval. L’accouplement. est bon, et le rendement peut atteindre 65 pour 100. Dans les roues Sagebien (fig. 3), l’eau entre avec une très faible vitesse. Les aubes forment avec le coursier des espaces fermés presque hermétiquement, et, dans ces connditions, l’accouplement de l’eau et des aubes se fait à une vitesse très faible et durant toute la chute de l’eau, c’est ce qui explique le rendement excellent, 0, 75, qu’on peut atteindre avec ces roues.
Cependant la difficulté d’installation et le prix de la roue ont fait remplacer celle-ci à leur tour par les turbines, qui présentent d’énormes avantages et sont susceptibles actuellement de s’employer aux basses comme aux hautes chutes.
Les turbines réalisèrent du premier coup, dans leur forme générale, l’accouplement cinématique idéal, ayant lieu sur toute la périphérie de la roue et ne laissant par suite sur celle-ci aucune partie inutile.
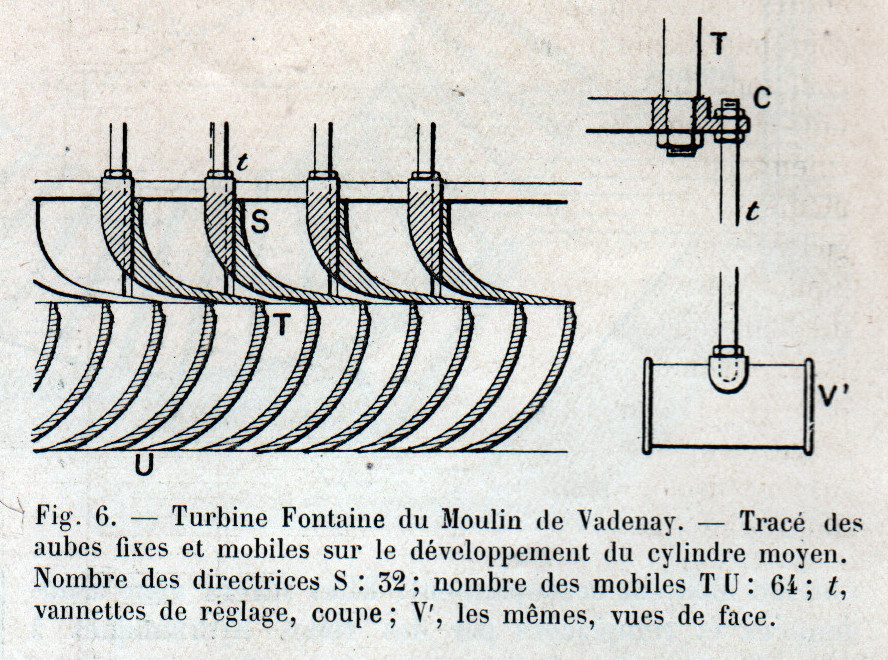
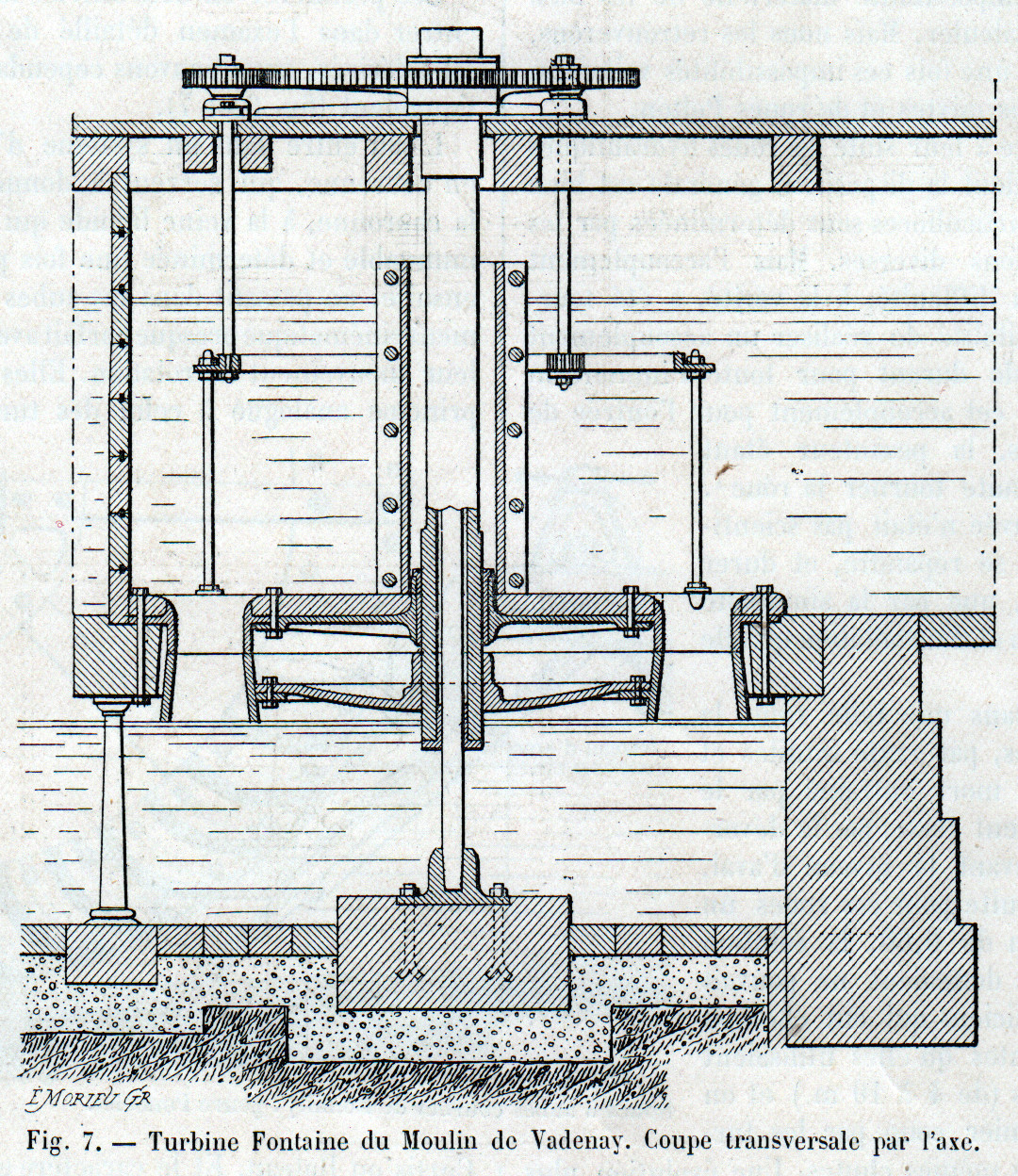
Les premières en date sont les turbines parallèles. Sans entrer dans l’examen détaillé de tous les types qui en sont dérivés, nous pouvons cependant les décrire schématiquement (fig. 6 et 7).
L’eau entre dans un système d’aubes fixes, disposées en couronne, qui servent à donner en chaque point de la couronne, à la veine liquide qui en sort, une direction immuable et déterminée une fois pour toutes. Elle forme ensuite, en passant dans les aubes mobiles, un accouplement cinématique presque parfait avec celles-ci et détermine leur mouvement de rotation. Elles marchent d’après un principe analogue à celui des turbines à vapeur genre Curtis ou Rateau. El le caractère général qu’elles présentent est de dévier une colonne d’eau pour utiliser cette déviation dans le but de produire un travail déterminé. Elles sont évidemment encore imparfaites à ce dernier point de vue et cela résulte de ce qu’il faudrait théoriquement que l’eau fut déviée sans qu’il y ait pour cela d’aubages directeurs. Mais c’est un écueil que l’on retrouve forcément dans tous les types.
La théorie mathématique, imparfaite d’ailleurs de ces moteurs, fut donnée par le grand mathématicien Euler [2]
Et au commencement du XIXe siècle, époque de leur apparition, la mécanique était assez avancée pour que l’on pût construire ces turbines d’une façon correcte. Ainsi donc, elles réalisaient plusieurs avantages : un caractère de machine relativement parfait, une construction facile dans l’état contemporain de la mécanique. Leur succès était assuré, et ces moteurs avec leurs dérivés se sont extrêmement répandus. Leur rendement est d’environ 70 % et constituait un progrès sur les roues qu’elles remplaçaient. Mais elles présentent des inconvénients assez graves. L’accouplement cinématique n’est bon que pour une chute déterminée, et par suite elles partagent avec les roues le désavantage de ne pouvoir s’appliquer que dans des cas nettement définis. De plus leur installation est assez dispendieuse.
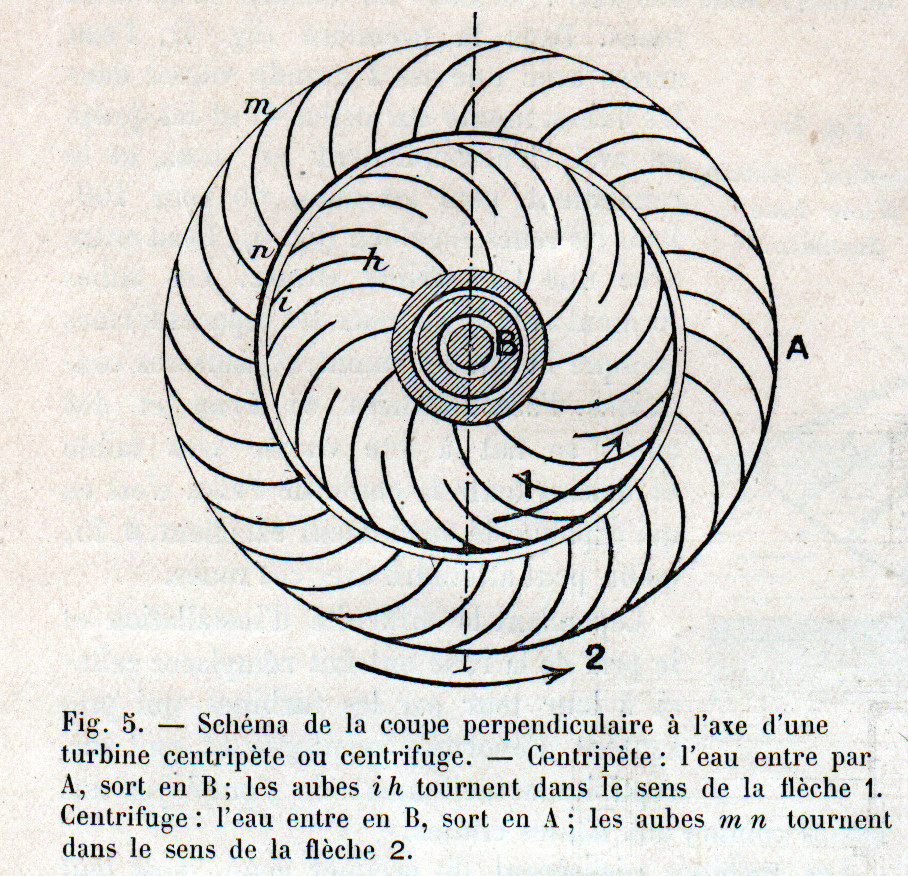
En même temps que les turbines parallèles, dont le type le plus courant est la turbine Fontaine, des chercheurs, à la poursuite de cet accouplement cinématique dont ils sentaient la nécessité, créaient les turbines centripètes et les turbines centrifuges. Leurs avantages sont les mêmes, relativement aux roues, que pour les parallèles ; leurs inconvénients également. Dans les trois types, les qualités cinématiques constituent un progrès et leur caractère distinctif peut se résumer ainsi :
Turbines centrifuges. - L’eau se meut dans un plan perpendiculaire à leur axe de rotation, et en s’éloignant de celui-ci. Types : turbine Fourneyron (fig. 5).
Turbines centripètes. - L’eau se meut dans un plan perpendiculaire à l’axe de rotation, mais en s’approchant de celui-ci. Première application faite par Poncelet (fig. 5).
Turbines parallèles. - L’eau se meut en restant constamment parallèle à l’axe de rotation. Type : turbine Fontaine.
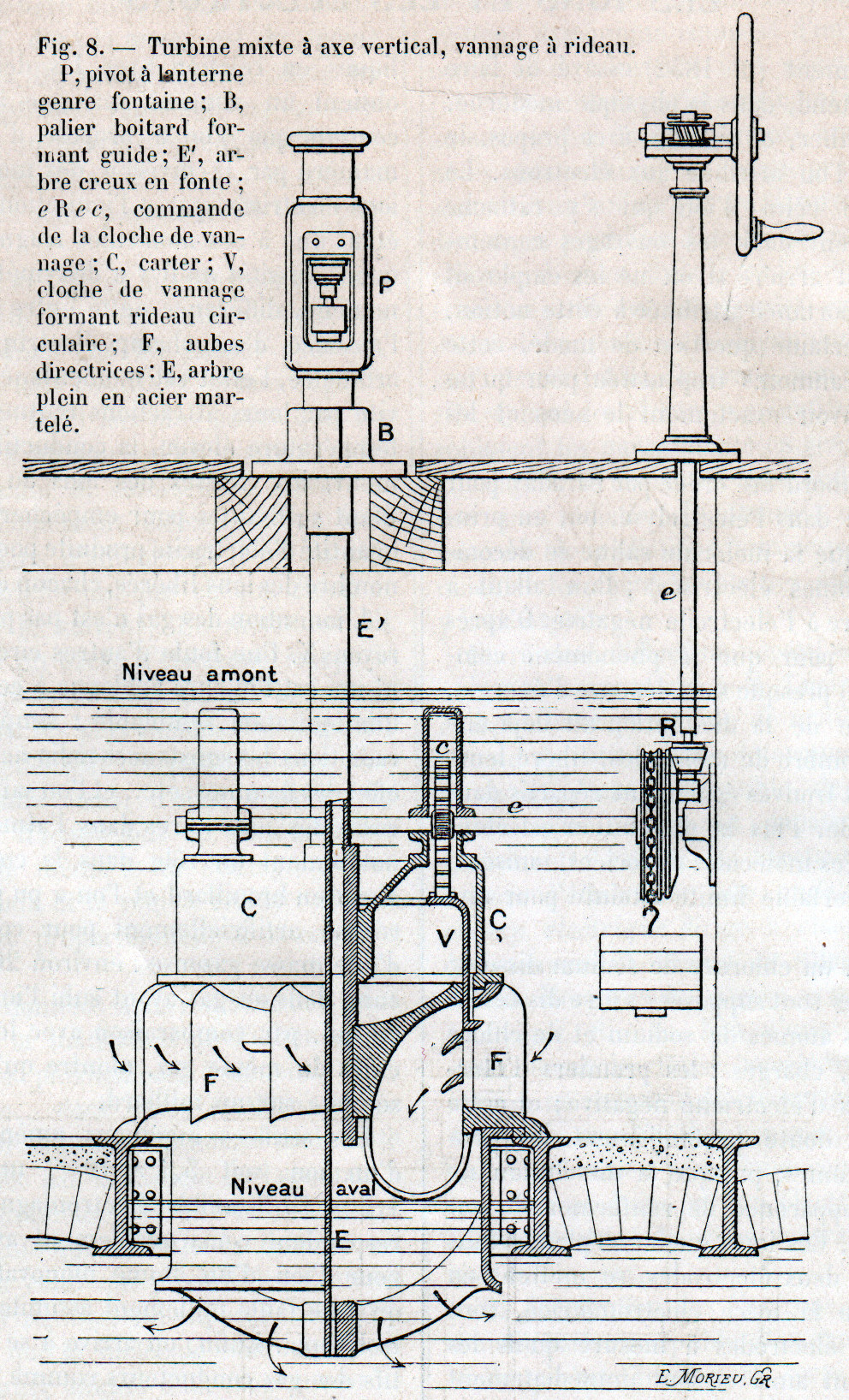
Les qualités de détail de ces turbines étaient assez différentes cependant et en les combinant on est arrivé à créer des turbines mixtes, qui sont à la fois centripètes et parallèles. Dans celles-ci, l’accouplement cinématique de l’eau et des aubes est très bon, et elles réalisent enfin ce que l’on désirait tant trouver : l’adaptation d’un moteur à des chutes diverses (fig. 8 et 9).
On a donc réussi, hydrauliquement, par des évolutions confuses, à réaliser ce dont nous parlions au début : l’adaptation cinématique parfaite, l’accouplement correct de l’eau et des aubes de roue, dans le cas de veines liquides, très variables dans leurs formes, leur débit, leur vitesse.
C’est le seul point. que nous pouvions faire ressortir dans un exposé aussi rapide, renvoyant aux ouvrages spéciaux pour les détails techniques, il nous reste un mot à dire sur la place que doivent prendre les roues Pelton dans l’histoire d’une telle évolution (fig. 10).
Nous n’hésitons pas à déclarer que ces moteurs, si répandus pour les très hautes chutes, si appréciés pour leur bonne marche, sont très imparfaits au point de vue cinématique. L’accouplement de chaque godet avec la veine liquide est assurément meilleur que dans le rouet primitif décrit par Bélidor. Mais l’eau n’agit toujours qu’en un ou plusieurs points déterminés de la circonférence, et les autres godets constituent un poids mort qui fait de ces roues des appareils cinématiques imparfaits. Ils n’ont donc pas subi, à proprement parler, d’évolution cinématique : depuis Bélidor. La construction mécanique en a progressé, la théorie mathématique également ; mais le principe est resté ce qu’il était : imparfait.
L’évolution que nous venons d’esquisser pour les moteurs hydrauliques ne s’est pas faite avec la netteté que nous lui avons volontairement donnée.
En réalité, il existe encore actuellement dans un pays restreint, la France par exemple, des types de chacun des moteurs examinés.
Roues pendantes, rouets, roues en dessus, Poncelet, Sagebien, turbines parallèles, centripètes, centrifuges, turbines mixtes et roues Pelton, il suffit de se promener le long d’un cours d’eau pour rencontrer dans les installations hydrauliques des spécimens de ces modèles.
Il existe aussi de nombreux types que l’on pourrait considérer comme les termes intermédiaires de cette série évolutive et dont nous ne pouvions parler dans une étude aussi restreinte.
Mais, quoique confuse, l’évolution existe, permet de se rendre un compte exact des nécessités qui ont fait naître tel type de moteur et peut permettre également, pour un esprit clairvoyant, de prévoir une partie des transformations futures qui ne peuvent manquer certainement de se produire.
Jacques Lafitte, Ingénieur civil.

