Les scaphandres et cloches à plongeurs — seuls engins dont on dispose actuellement pour descendre dans la mer — ne permettent pas de dépasser des profondeurs de 30 à 40 mètres ; Au-delà, la pression mettrait en péril la vie humaine. Aussi quantité de navires échoués en mer à une cinquantaine de mètres de profondeur, — et même visibles il la surface, — restent-ils hors de notre portée. A fortiori, semblaient condamnés à un éternel abandon les nombreux bâtiments gisant à de plus grandes profondeurs et qui échappent complètement aux vues les plus perçantes. Il y aurait cependant un grand intérêt à récupérer du fond des océans les navires qui y ont coulé à la suite de naufrages. Des trésors considérables et extrêmement nombreux, dispersés sous toutes les latitudes, seraient ainsi subitement mis au jour.
Le comte Piatti dal Pozzo s’est posé ce problème et a imaginé, pour le résoudre, l’appareil que nous allons décrire (fig. 1 à 5).
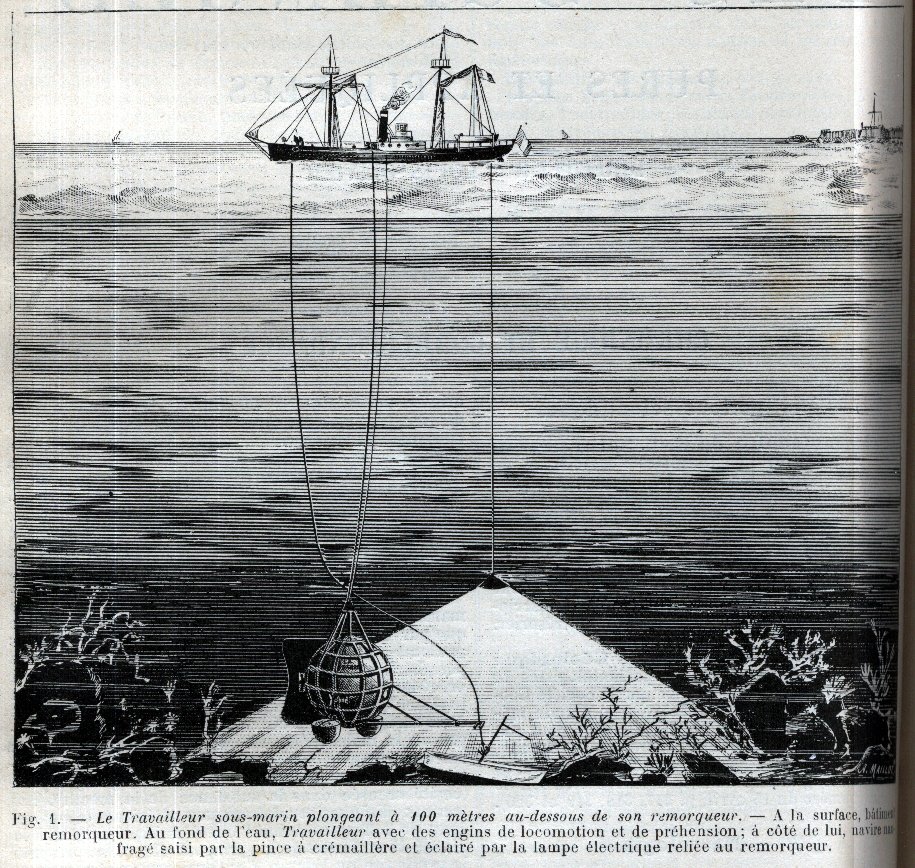
L’idée directrice de l’inventeur a été de munir le bateau destiné à l’exploration des fonds de mer, d’une boule d’acier complètement close, susceptible de contenir plusieurs hommes, d’être descendue très profondément dans l’eau (fig, 1) sans s’aplatir sous l’effort de la pression, et disposée de telle façon que ses habitants puissent, d’une part, voir ce qui se passe en dehors de leur demeure provisoire, et, d’autre part, rester en communication téléphonique constante avec le navire. Ce navire est pourvu, en outre, d’engins de préhension que ses marins dirigent sur le vaisseau naufragé, suivant les indications des ouvriers descendus dans la boule à proximité de l’épave.
La conception semblait facile. Il était moins aisé de la mettre pratiquement à exécution. Nous pensons toutefois que l’inventeur y a réussi, car il vient de soumettre son appareil il une série d’épreuves qui, bien qu’encore insuffisantes, imposent néanmoins l’examen de son système.
La pièce principale de ce système est la boule creuse dont nous venons de parler. L’auteur lui donne le nom de Travailleur sous-marin. Il a choisi la forme sphérique parce que c’est celle qui résiste le mieux à la pression. La coque est épaisse de 4 centimètres ; elle offre 3,50m de diamètre intérieur, et se compose de deux hémisphères étroitement unis, dont la surface est exactement polie au tour (fig, 5).
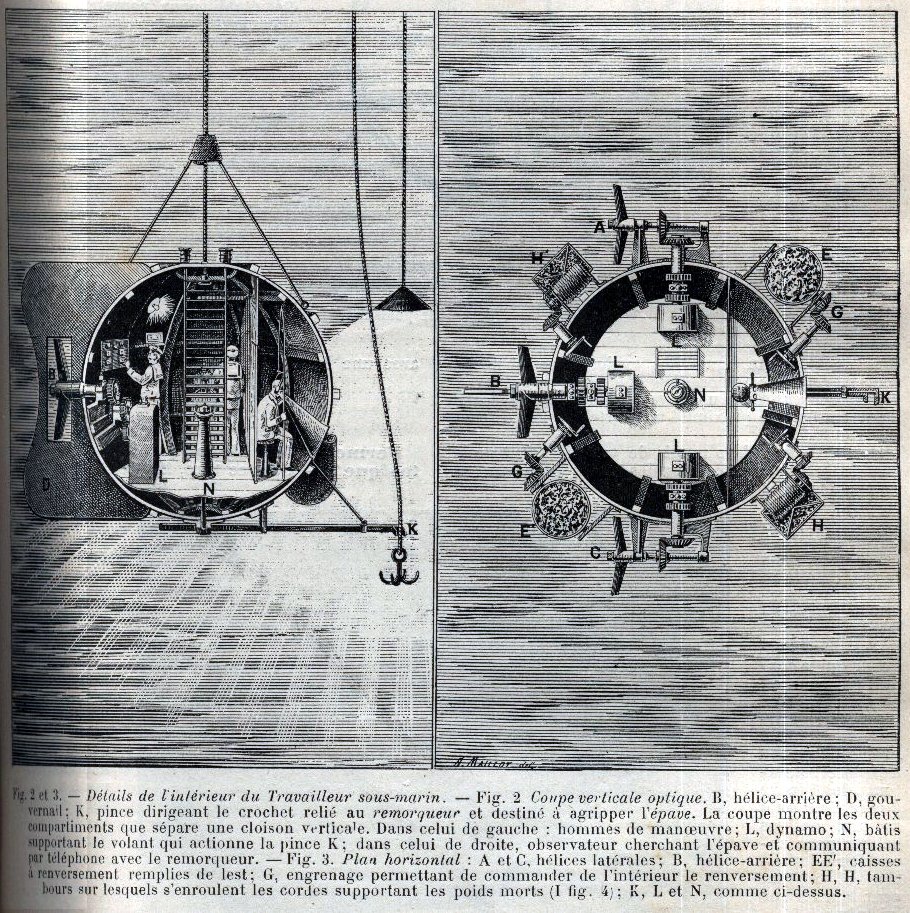
Cet engin, dont la figure 2 représente la coupe verticale, la figure 3 la coupe transversale et la figure 4 la carcasse, est muni extérieurement de trois hélices — une en arrière (B, fig. 2 et 3) et deux latérales (A et C, fig.-3) - ainsi que d’un grand gouvernail fixe à large safran (D, fig. 2), sorte de queue de poisson rigide destinée à lui donner de l’assiette et à régulariser les mouvements de déplacement en empêchant l’affolement. L’hélice-arrière permet d’effectuer les mouvements en avant ou en arrière et suivant que l’on fait marcher l’une ou l’autre des hélices latérales, on obtient un mouvement de virage à droite ou à gauche.
Sur les flancs du Travailleur sous-marin et diamétralement opposées, sont fixées des caisses à renversement (E, E’, fig 3), remplies de lest (sable ou cailloux) que l’on peut vider au moyen d’un volant intérieur agissant sur les caisses basculantes par des engrenages d’angle (G, fig. 3).
Normalement au diamètre de ces caisses, se trouvent deux tamhours (H, H’, fig. 3 et 4) sur lesquels s’enroulent des cordes supportant des poids morts que l’on peut descendre au fond de l’eau quand on en est assez rapproché (I. fig. 4) ; on allège ainsi la sphère plongeante, qui devient captive à la manière d’un ballon muni de guideropes à poids traînants.
Enfin, à la partie inférieure de l’appareil, se trouve une pince à crémaillère (K, fig. 2, 3 et 4). Cette pince est actionnée de l’intérieur sur l’ordre du commandant, lequel, au travers des hublots, suit tous les mouvements de la pince.
L’ensemble de l’engin pèse environ 10 tonnes, y compris un bâti extérieur en bois (fig. 4) formant un large treillis en charpente, destiné à protéger la coque contre les chocs imprévus et aussi à porter et fixer divers appareils accessoires (fig. 1).
Un câble d’attache, enroulé sur un treuil, soutient le Travailleur sous-marin à l’état captif sur les flancs du navire remorqueur. Ce câble le fait descendre à la profondeur voulue, selon l’ordre que le commandant, installé dans la chambre sous-marine (fig. 2), transmet au remorqueur par un fil téléphonique placé dans le câble de suspension. Ce câble sert aussi à transmettre la puissance motrice fournie par des générateurs électriques placés à bord.

L’intérieur du Travailleur forme une grande chambre sphérique munie d’un plancher à la partie inférieure et divisée en deux parties inégales par une paroi verticale (fig. 2).
La plus grande de ces deux chambres sert aux moteurs et appareils destinés à actionner les hélices et la pince à crémaillère. Trois dynamos (L fig. 2 et 3) commandent séparément chacune des hélices A, B, C.
Des accumulateurs électriques tenus en réserve, servent, en cas de besoin, à suppléer à la puissance motrice fournie par le remorqueur de surface, au cas où le câble viendrait à se rompre.
Au milieu du plancher se trouve un bâti (N, . fig. 2 et 3) supportant un volant horizontal et sa transmission pour actionner la pince à crémaillère K. Enfin, une échelle (fig. 2) permet de descendre à l’intérieur du Travailleur sous-marin par un trou d’homme situé à la partie supérieure de la sphère.
La plus petite des chambres sert de poste d’observation et de commandement, grâce à un appareil lenticulaire et à un téléphone qui transmet les ordres en haut. Au cours des explorations et pèches sous-marines, le remorqueur doit projeter autour du Travailleur sous-marin une vive lumière. Aussi descend-il sur les fonds à proximité une forte lampe électrique (fig. 1 et 2).

En outre, des câbles munis de grappins sont aussi, quand il y a lieu, descendus des flancs du navire : ils sont guidés et mis en place par le Travailleur sous-marin, lequel n’a pas besoin, dans ce cas, d’avoir un mouvement propre de déplacement.
C’est le remorqueur qui le conduit en avant ou en arrière, et ce n’est que lorsqu’il se trouve à proximité du lieu à explorer, et surtout de l’épave à récupérer qu’il se sert de ses hélices pour approcher davantage et surtout pour tourner sur lui-même.
Dans le cas où, pour une cause quelconque, le câble de suspension viendrait à se rompre, le ballon captif sous-marin ne serait pas pour cela en perdition. Se trouvant en équilibre entre deux eaux comme à l’état captif, il continuerait à flotter en changeant de niveau.
Pour le faire remonter à la surface, on n’aurait qu’à vider les deux caisses basculantes (E, E’, fig. 3) remplies de lest, Le sous-marin délesté acquerrait aussitôt une certaine force ascensionnelle qui le ferait émerger.
Cet appareil, construit par M. A. Delisle, constructeur naval à Vitry-sur-Seine, a été mis sur chantier le 15 décembre 1896 et sera terminé vers le 10 mai prochain.
Les essais auront lieu, en petit, en Seine, puis repris et exécutés en grand à Brest et au Havre.
Des démarches, sont faites auprès de l’État en vue d’obtenir un chaland pour exécuter les essais.
On a apporté dans la construction du nouvel engin le plus grand soin et il a été établi pour pouvoir descendre et manœuvrer jusqu’à une profondeur de 500 mètres.
M. Piatti dal Pozzo, qui est déjà descendu dans un appareil de ce genre, mais moins bien construit et moins perfectionné, jusqu’à une profondeur de 160 mètres dans la baie de Civita-Vecchia en 1893, compte pouvoir descendre, sans difficulté aucune, à plusieurs centaines de mètres et y manœuvrer avec une facilité parfaite et une sécurité absolue.
G.-L, Pesce, Ingénieur des Arts. et Manufactures
