[!sommaire]
Le « principe » et les propriétés des mouvements louvoyants constituent un de ces chapitres de la mécanique classique que les professeurs ont coutume de liquider en quelques lignes et qui sont finalement très mal connus et interprétés par de nombreux esprits de bonne culture scientifique.
Ce curieux ostracisme s’étend, disons-le tout de suite, à la quasi-totalité des chapitres de frottement dont les mouvements louvoyants représentent une partie spécialement délicate. Tout bachelier ès sciences doit raisonner impeccablement sur la machine d’Atwood, sur la proportionnalité des forces et des accélérations, mais les connaissances exigées sur le frottement (coefficient, angle de glissement) sont rudimentaires. Et combien de mathématiciens plus avancés ignorent que les mouvements louvoyants procurent une autre proportionnalité infiniment plus rare, celle des forces et des vitesses !
Frottements, louvoiement, dérapage, de même que certaines élasticités, sont trop souvent envisagés comme des forces parasites, des « erreurs » regrettables de la matière. On est ainsi conduit à des études vraisemblablement incomplètes qui se traduisent par des anomalies de fonctionnement bien réelles ; nous rappellerons seulement certains enroulements inopinés dont se plaignent les contre-maîtres, dans les moutons à courroie, et qui semblent révéler une insuffisance de la loi exponentielle des frottements du type cabestan.
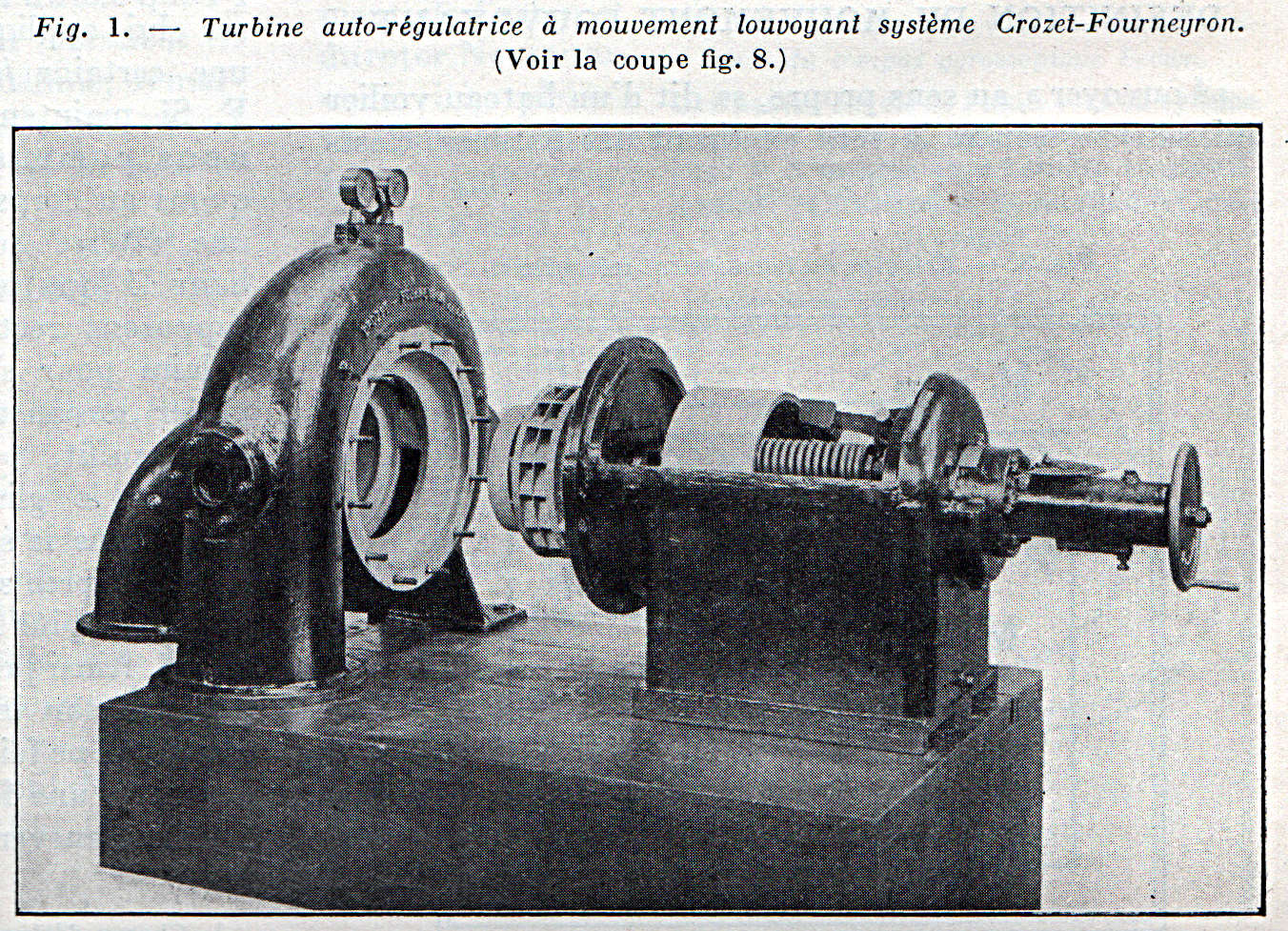
Nous voudrions présenter à nos lecteurs, avec un bref aperçu sans prétentions sur la théorie de ces mouvements composites, un certain nombre d’applications industrielles (fig. 1) des mouvements louvoyants.
Définition du mouvement louvoyant
« Louvoyer », au sens propre, se dit d’un bateau voilier qui remonte contre le vent en tirant des bordées, c’est-à-dire par une route en zigzag ; de façon à avoir toujours le vent de côté, tantôt à droite, tantôt à gauche (fig. 2).
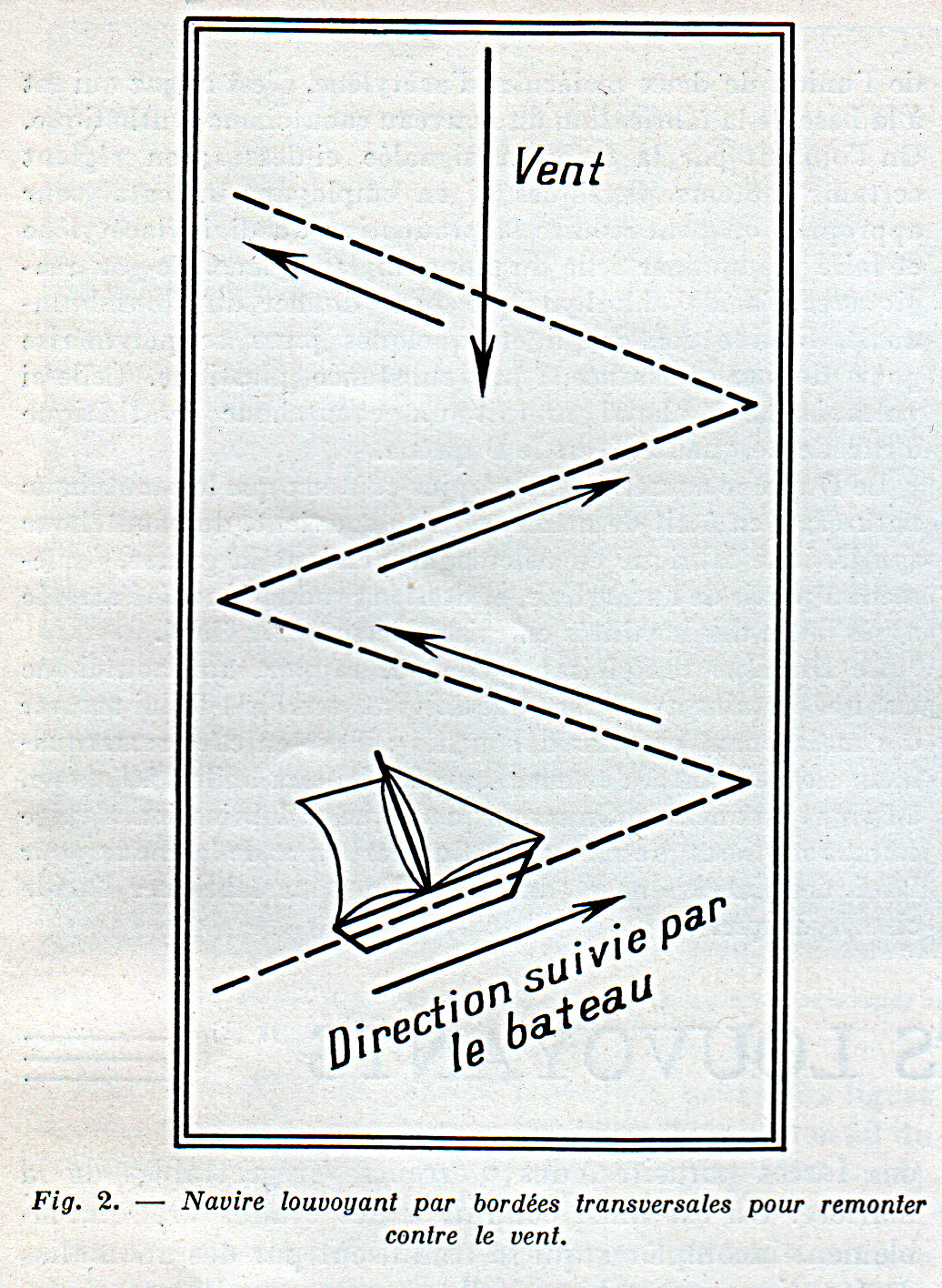
Notons tout d’abord, d’un point de vue théorique, qu’une telle opération, qui permet de soutirer aux forces du vent des quantités indéfinies d’énergie, serait impossible dans un champ de forces telles que la pesanteur, les forces magnétiques ou électrostatiques [1]. Il faut que la force qui s’exerce sur le mobile dépende d’un facteur auxiliaire disponible, ici l’orientation de la voile. Nous retrouverons dans le mouvement louvoyant ce caractère qu’il faut au moins une source d’énergie extérieure, ce qui le différencie des autres mouvements, avec ou sans frottement, où l’inertie peut suffire comme moteur temporaire.
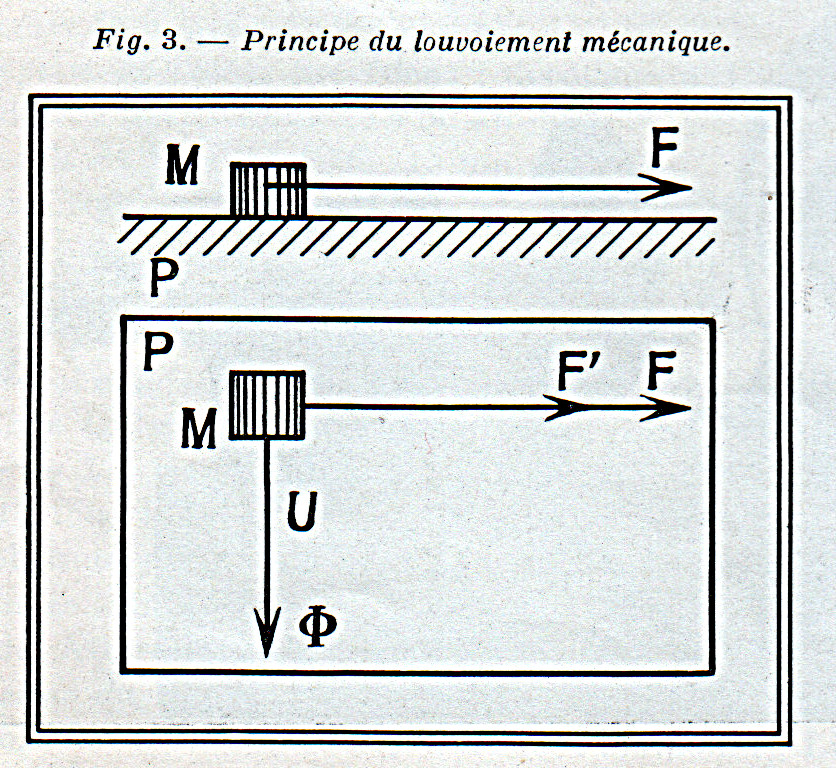
Voici maintenant comment on se représente généralement un mouvement louvoyant (fig. 3). Un corps pesant étant posé sur un plan rugueux P, il faut pour le faire glisser lui appliquer une certaine force F. Si maintenant nous communiquons au corps M une vitesse auxiliaire U (que nous supposons rectangulaire pour simplifier), on constate qu’il suffit, pour obtenir le glissement dans le sens F, d’une force sensiblement plus faible F’. Ainsi présenté, le phénomène paraît assez mystérieux et son interprétation reste purement qualitative, puisqu’on ne fait pas intervenir la grandeur de la vitesse U. On dit, d’une façon incorrecte mais expressive, que « la vitesse transversale U produit une diminution apparente du coefficient de frottement dans la direction F ».
Citons quelques exemples empruntés à la vie courante. Quand une automobile roule sur le côté d’une route bombée et glissante, le dérapage ne se produit pas tant que les différents points du pneu viennent s’appliquer sur le sol sans glissement longitudinal ; mais si un coup de frein ou d’accélérateur l’oblige à patiner longitudinalement, le dérapage transversal apparaît aussitôt. Pour enfoncer un poinçon lisse dans une substance résistante, on a avantage à faire tourner ce poinçon comme si on le vissait ou, ce qui revient au même, à le faire pivoter alternativement vers la droite et vers la gauche sans cesser d’appuyer.
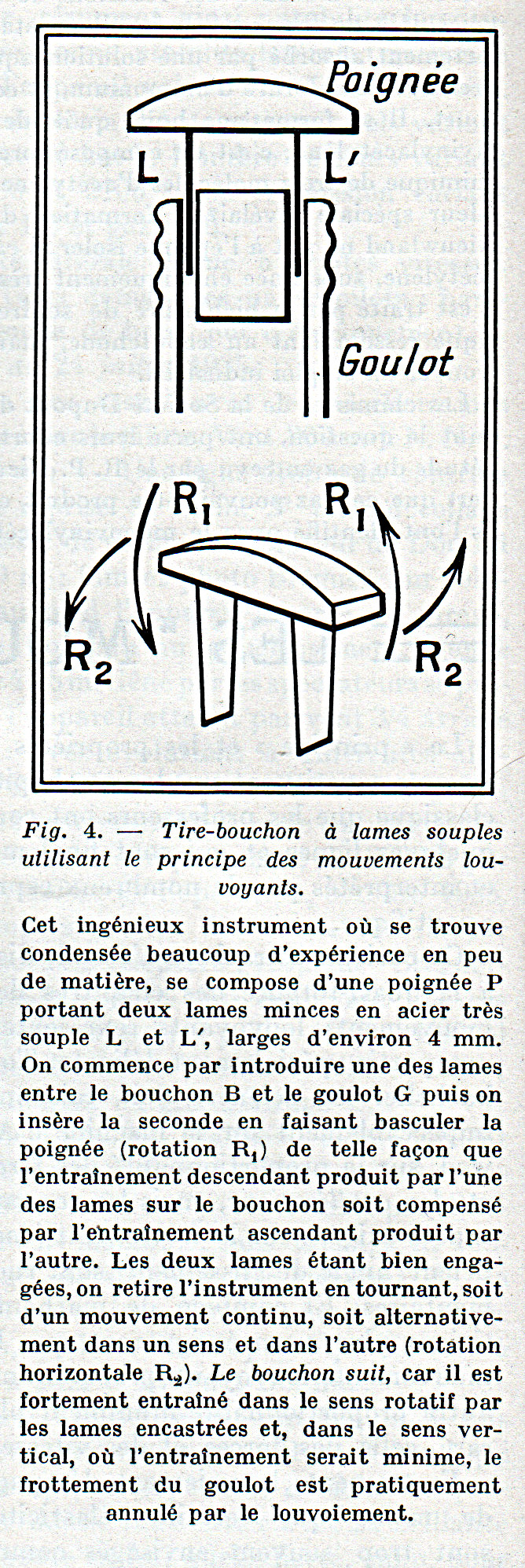
Le tire-bouchon à deux lames que représente notre fig. 4 constitue une application extrêmement remarquable des mouvements louvoyants et de plusieurs principes de théorie du frottement. Le terme de louvoiement est ici parfaitement juste et fait image.
Éliminons une erreur classique
Faisons justice tout d’abord d’une erreur courante qui vient fausser la notion de mouvement louvoyant.
On sait que le frottement, qu’il s’agisse de glissement, de roulement ou de pivotement, est plus considérable au repos qu’en mouvement. Ainsi, cinq hommes seront nécessaires pour « décoller » un wagon de marchandises alors que quatre hommes ou même trois suffiront pour le maintenir en marche. De là tout l’intérêt qu’il y a à ne pas laisser s’arrêter une charge que l’on pousse ou à conserver une vitesse, même très réduite, quand on conduit une automobile au milieu des encombrements, pour faciliter les reprises.
Il est certain que le bénéfice provenant d’un mouvement louvoyant peut se superposer à ce bénéfice du « coefficient de frottement plus faible en marche ». Il importe donc de les séparer, c’est-à-dire de convenir une fois pour toutes que le mobile ne sera jamais au repos.
Ainsi, en se reportant à la figure 3, nous dirons que F, force initiale de comparaison, est celle qui maintient en marche le corps M : force parfaitement définie, remarquons-le, car si elle était plus faible, le corps s’arrêterait et si elle était plus considérable, il prendrait un mouvement uniformément accéléré.
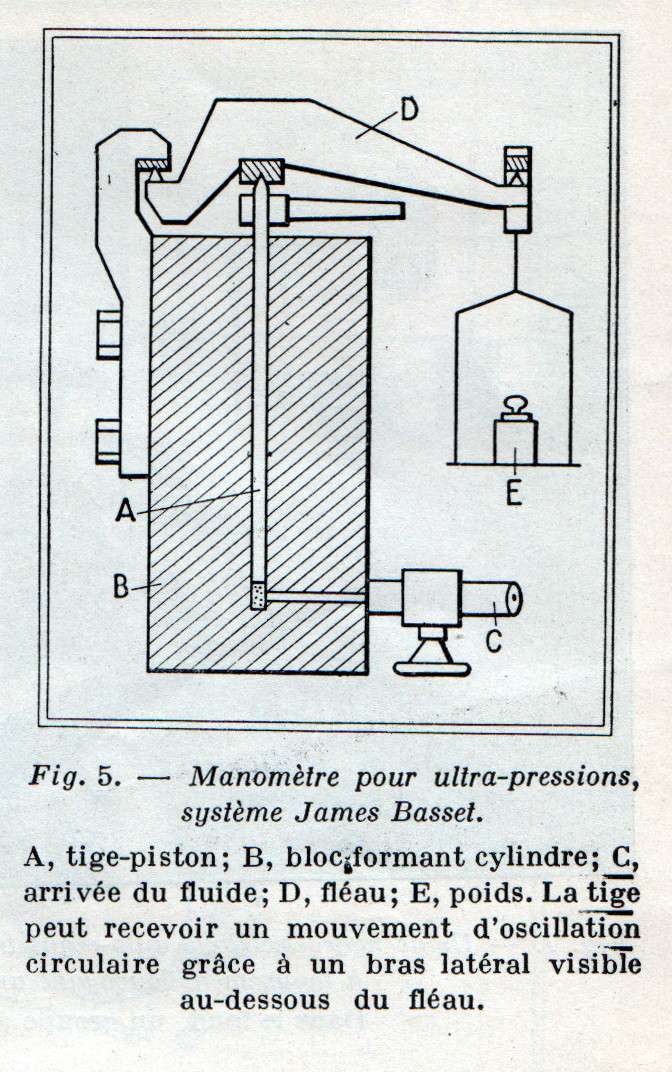
Manomètre à ultra-pression. Compas Brown
Envisageons maintenant quelques applications mécaniques du louvoiement.
Pour mesurer les ultra-pressions qu’il est arrivé à réaliser dans son laboratoire et qui peuvent atteindre 28 000 atm [2], M. James Basset a construit un manomètre à mesure directe dont la tige-piston peut être rendue très libre, dans son alésage, cependant extrêmement serré, grâce à un mouvement d’oscillation circulaire (fig. 5).
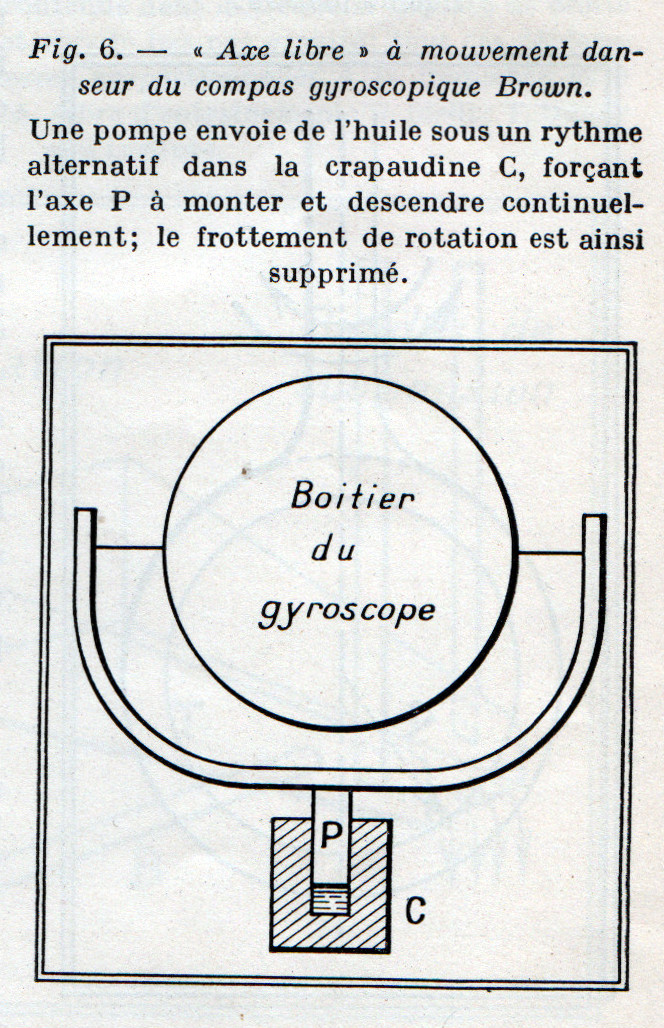
La disposition inverse est utilisée dans le compas gyroscopique Brown pour supprimer le frottement de rotation de l’axe P du cadre dans sa crapaudine fixe C (fig. 6) ; à cet effet, une petite pompe injecte de l’huile sous une pression rythmée dans la crapaudine, faisant monter et descendre l’axe P et l’ensemble du gyroscope à une cadence relativement rapide.
Turbine autorégulatrice
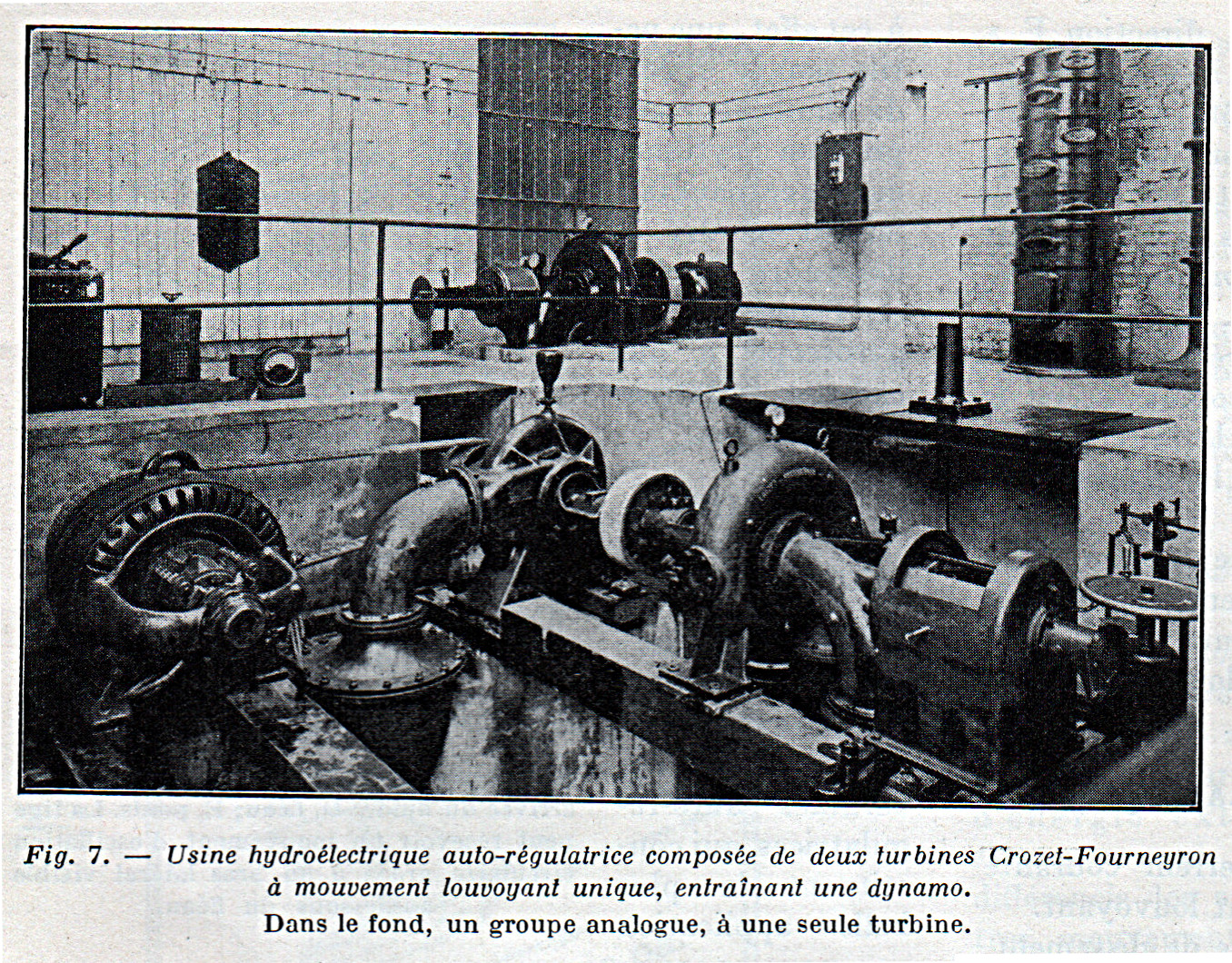
Les établissements Crozet-Fourneyron ont mis au point des turbines auto-régulatrices qui constituent la plus belle application que nous connaissions du mouvement louvoyant pur (nous précisons cette notion plus loin). Les fig. 1, 7 et 8 montrent la présentation et les dispositions intérieures de ces remarquables turbines. Fonctionnant par mouvement centripète de l’eau et sans la moindre poussée axiale, le rotor forme lui-même obturateur (fig. 1 et 8).
En le déplaçant longitudinalement, on peut donc obtenir la régulation ; cette fonction est confiée à un régulateur à masselottes centrifuges, comme le montre la figure 8.

Il est essentiel de remarquer que la faible poussée du régulateur serait totalement insuffisante pour produire d’une façon correcte le coulissement de l’arbre et du rotor. Nous trouvons ici, pleinement utilisé, cet effet d’ « aide mécanique » c’est-à-dire de servo-moteur qui fait que le mouvement longitudinal est rendu facile tout en restant sous le contrôle strict de la force directement appliquée (voir aussi fig. 14).
Ce principe est appliqué sous une forme analogue dans un certain nombre de régulateurs.
Excentrique à mouvements louvoyants
M. Myard, le distingué professeur de l’École Centrale, qui a créé de nombreux mécanismes nouveaux et curieux [3], a construit un excentrique réversible à mouvements louvoyants.
On sait que la liaison par excentrique ne fonctionne dans le sens bielle-arbre que moyennant certaines conditions de frottement du disque dans son collier. Dans le cas général, avec un graissage normal et un rayon de disque très supérieur à l’excentricité (l’excentricité est le rayon du cercle décrit par le centre du disque), l’appareil est irréversible ; il peut être utilisé, par exemple, pour la distribution d’une locomotive mais non pour transmettre à l’essieu l’effort moteur du piston.
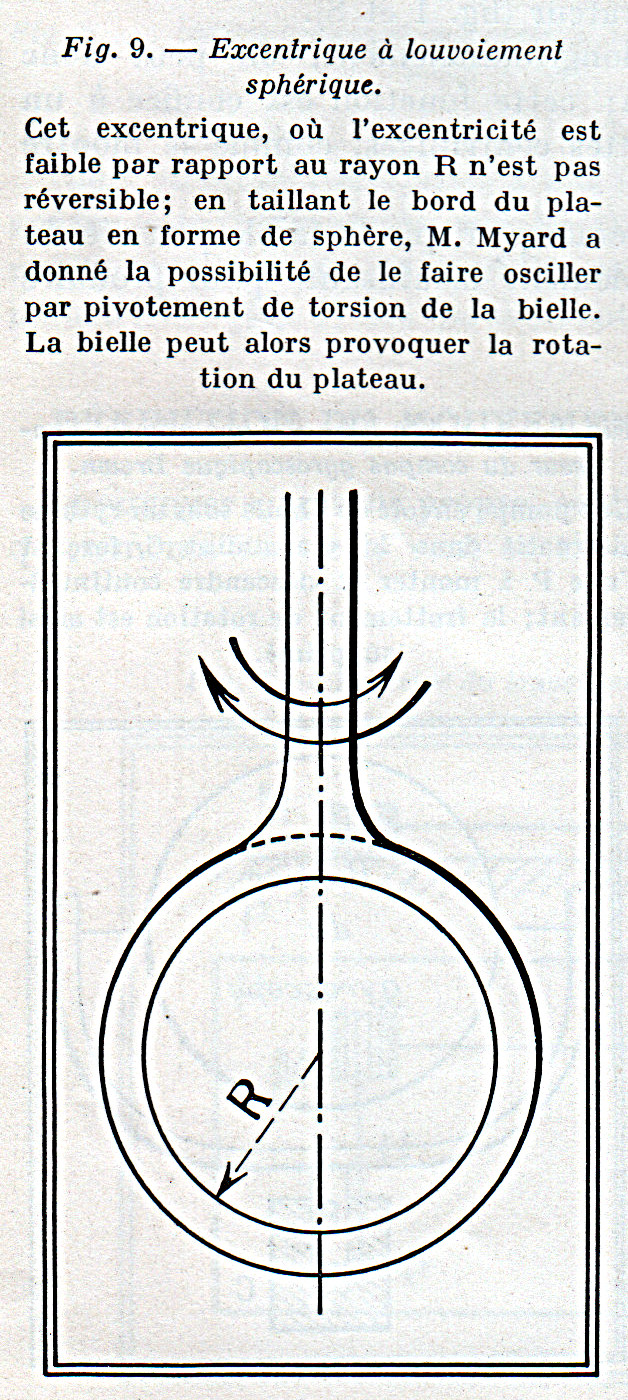
Dans l’excentrique oscillant, système Myard (fig. 9), le pourtour du plateau est une zone sphérique en sorte qu’il est possible de faire pivoter alternativement la bielle et le collier autour de l’axe de figure de la bielle, Le contact devient alors louvoyant et on constate que l’excentrique est réversible comme s’il était monté sur billes.
Un modèle de démonstration existe actuellement à l’École Centrale ; il semble que le principe pourrait être appliqué dans certaines machines où l’on éviterait ainsi de couder l’arbre à entraîner. On peut toutefois se demander s’il ne se produirait pas des blocages à chaque demi-oscillation, au moment où le collier s’arrête pour s’incliner en sens inverse.
Proportionnalité des forces aux vitesses
Nous pouvons maintenant nous représenter d’une façon quantitative, ce qui est fort important, le mouvement louvoyant le plus général. Reprenons notre corps pesant M posé sur un plan rugueux horizontal P (fig. 3) d soumis à une force F exactement suffisante pour le maintenir en mouvement. Pour faire apparaître une vitesse transversale U (supposée rectangulaire pour simplifier) nous appliquons une force Φ (fig. 10, n° I). La résultante est alors R, plus grande que F et par conséquent le corps M prendrait un mouvement, accéléré. Pour l’en empêcher, nous sommes conduits à diminuer F, qui devient F’ (fig. 10, n° II) : c’est ce que nous exprimons sommairement en disant que le coefficient de frottement a décru dans la proportion de F’ à F. La construction précise l’importance de cette réduction qu’elle permet de calculer très simplement.
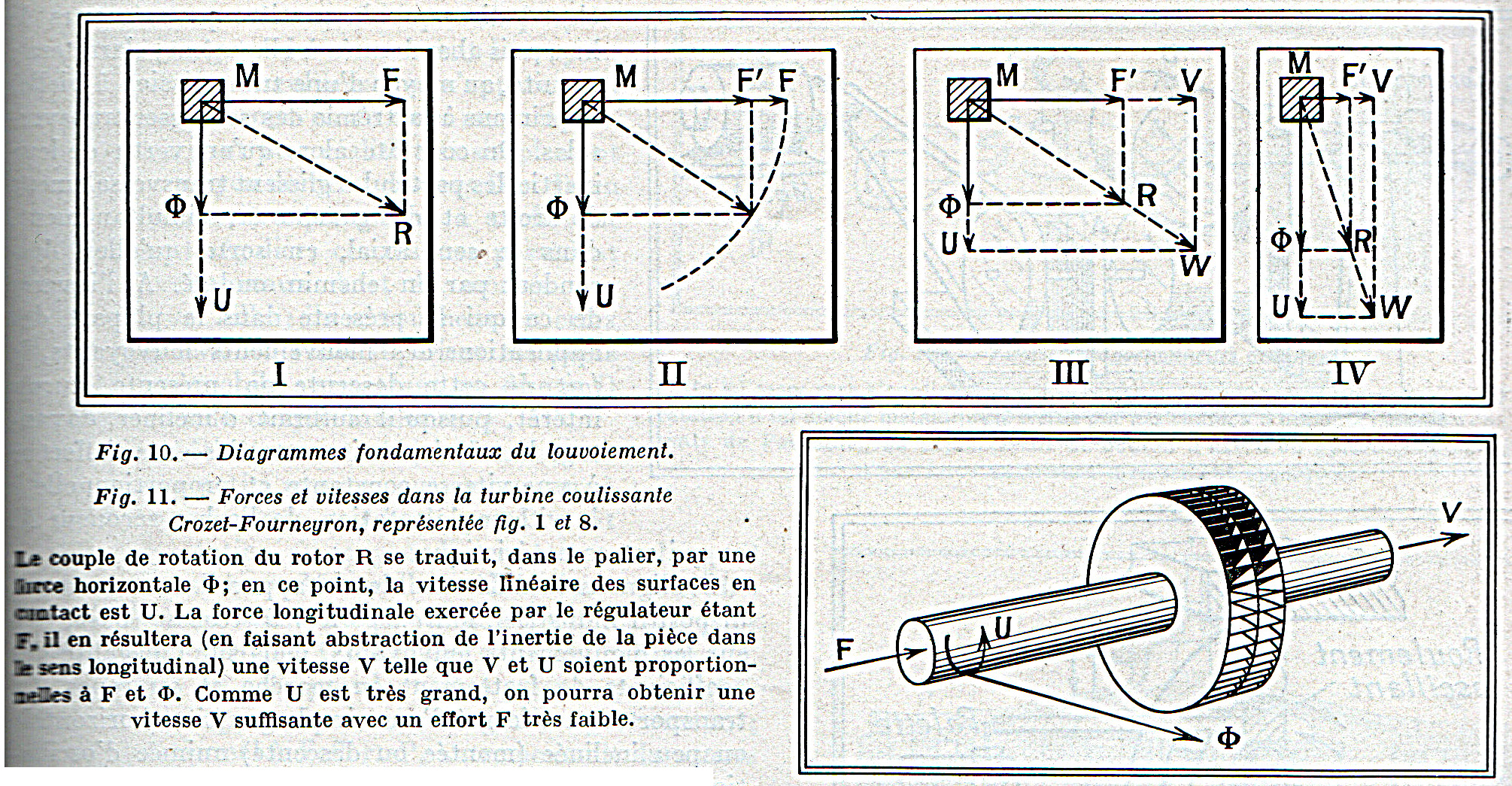
Passons aux vitesses. La seule force active appliquée étant la résultante R, le déplacement se produira dans cette direction ; nous voyons ainsi apparaître cette loi fondamentale mais bien rarement soulignée, des mouvements louvoyants, que les forces sont proportionnelles aux vitesses. C’est ce que concrétise le diagramme n° III.
Reprenons comme exemple la turbine coulissante (fig. 11). Sous l’action de la faible poussée longitudinale produite par le régulateur, l’axe prendra une vitesse ; longitudinale V égale au produit de F par la vitesse périphérique U de l’arbre dans ses coussinets, divisé par l’effort tangentiel Φ que doit vaincre cet arbre pour tourner dans ses coussinets. U étant très grand (diagramme n° IV de la fig. 10), un faible effort du régulateur suffit pour faire coulisser l’arbre d’un mouvement uniforme.
En général, dans les cas de mouvements louvoyants, la force « auxiliaire » est inconnue ; ce qu’on connaît, c’est la force F qu’il faudrait appliquer pour obtenir le glissement sans l’aide du louvoiement c’est-à-dire avec U = 0 (par exemple pour faire coulisser la turbine quand elle ne tourne pas). Les constructions de la fig. 10 indiquent immédiatement la vitesse V que procurera une force réduite F’.
Les deux épures très simples n° II et III permettent, sauf erreur, de résoudre tous les problèmes quantitatifs de mouvements louvoyants.
Problèmes pratiques : La « Trémie à secousses »
Un remarquable mécanisme industriel, la trémie à secousses, utilisé dans les exploitations minières, les carrières, les machines agricoles et de meunerie, va nous fournir une application quantitative des mouvements louvoyants (fig. 12).
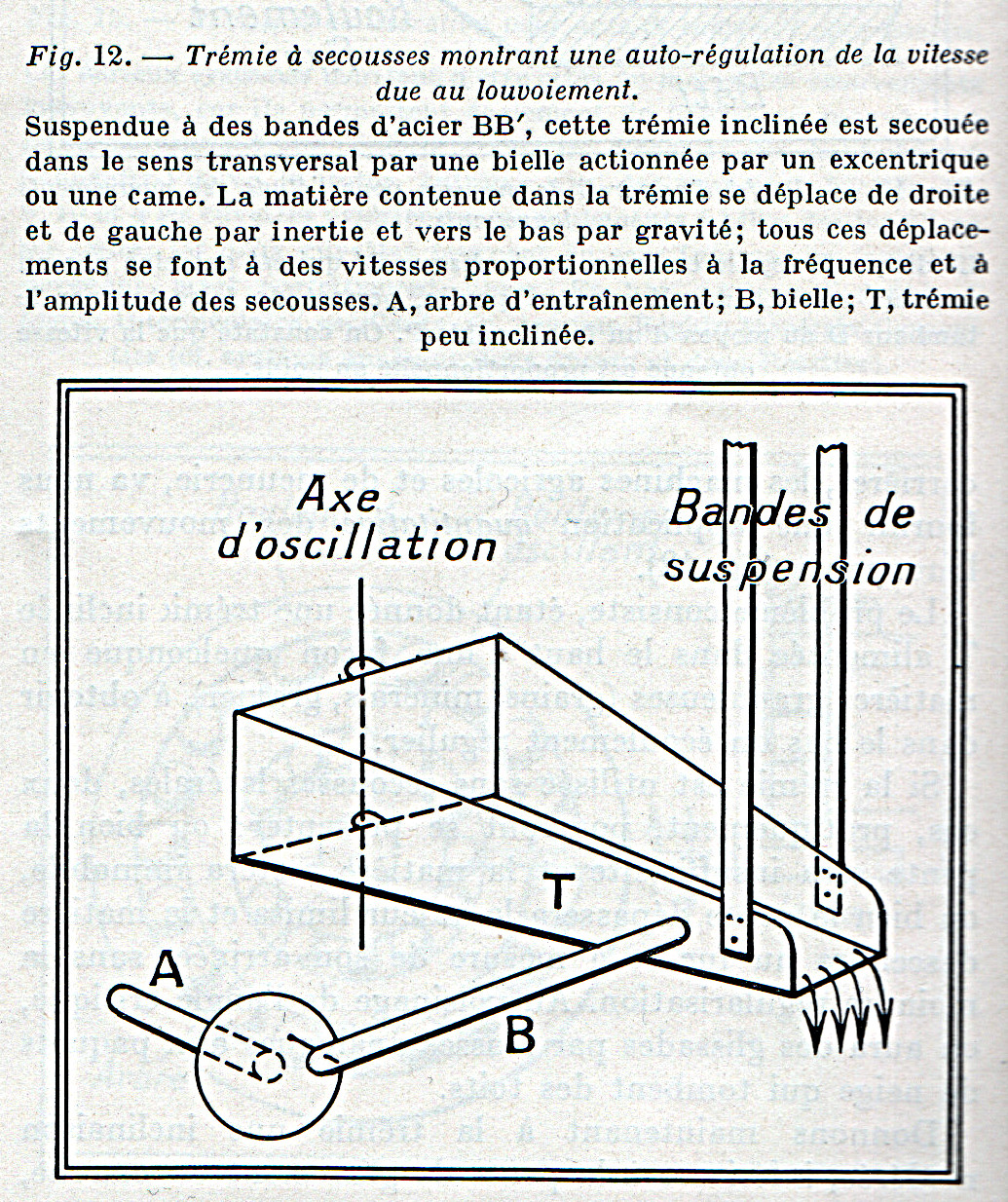
Le problème consiste, étant donnée une trémie inclinée T alimentée dans le haut d’une façon quelconque en matières granuleuses (grains, minerais, gravier), à obtenir dans le bas un écoulement régulier.
Si la trémie est utilisée sans secousses latérales, deux cas, pratiquement, pourront se présenter ; ou bien la pente sera insuffisante et la matière restera immobile, ou bien la pente dépassera la valeur limite et la matière descendra au fur et à mesure de son arrivée, sans la moindre régularisation. Au voisinage de l’angle critique, on aura des glissades par masses analogues aux paquets de neige qui tombent des toits.
Donnons maintenant à la trémie une inclinaison modérée, inférieure à la pente de glissement en marche, c’est-à-dire que la matière poussée vers le bas, puis abandonnée à elle-même, s’arrêtera ; ensuite, au moyen d’une transmission à bielle, imprimons à la trémie des secousses transversales. On constate alors qu’en vertu de leur inertie, les particules glissent transversalement de droite et de gauche et, simultanément, dans le sens axial, en sorte qu’elles descendent par un chemin ondulé. À l’inverse de ce qui se présente dans la plupart des applications des mouvements louvoyants, le fait de cette descente ne présente aucun intérêt, puisqu’il suffirait d’incliner davantage la trémie, mais cette descente s’effectue à une vitesse constante et proportionnelle à la vitesse de rotation de l’arbre secoueur A, ce qui est caractéristique.
Soulignons la différence de cet appareil avec un autre dispositif industriel, le transporteur à secousses base, non sur les mouvements louvoyants, mais sur l’inégalité des coefficients de frottement en marche et au repos. Ce transporteur est formé d’une simple gouttière horizontale ou peu inclinée (montée ou descente) animée d’oscillations longitudinales relativement lentes à l’aller mais à retour rapide ; les objets déposés dans la gouttière sont entraînés à l’aller et glissent sur place au retour. Ce principe se retrouve dans l’entraînement des cordes de violon par un archet et la plupart des vibrations entretenues par frottement.
Triple action des vibrations
Les vibrations produisent une disparition quasi totale des frottements, comme il est visible dans les méthodes de « vibration » et de « pervibration » du béton, ainsi que dans les assemblages mécaniques (écrous, clavettes, coins) où leur rôle néfaste est bien connu.
Le rôle des vibrations est complexe, notamment parce qu’elles font intervenir, à une échelle comparable à celle des déplacements, les déformations élastiques ; il se produit également des arc-boutements, des altérations de surfaces, voire des transformations moléculaires.
Cinématiquement, on peut distinguer trois actions suivant les trois directions de l’espace. Dans le sens longitudinal (sens du mouvement rendu possible par la vibration), on note un effet analogue à celui du transporteur à secousses ; dans le sens de la force coercitive (serrage d’un écrou, pesanteur) une libération périodique ; dans le sens transversal, un effet de louvoiement.
Pour reprendre l’exemple de la trémie, on peut la secouer longitudinalement comme un transporteur à secousses, faire vibrer le fond par percussion comme une peau de tambour ou la secouer transversalement comme dans le fonctionnement normal. Dans les trois cas, la matière contenue dans la trémie s’écoulera peu à peu.
Mouvements louvoyants comparés au gyroscope
Avant de passer aux réalisations industrielles du professeur Myard, il nous reste à décrire un projet d’appareil au permet de mettre en évidence les propriétés caractéristiques du mouvement louvoyant pur ; propriétés singulières qui s’apparentent à celles du gyroscope et du frein magnétique.
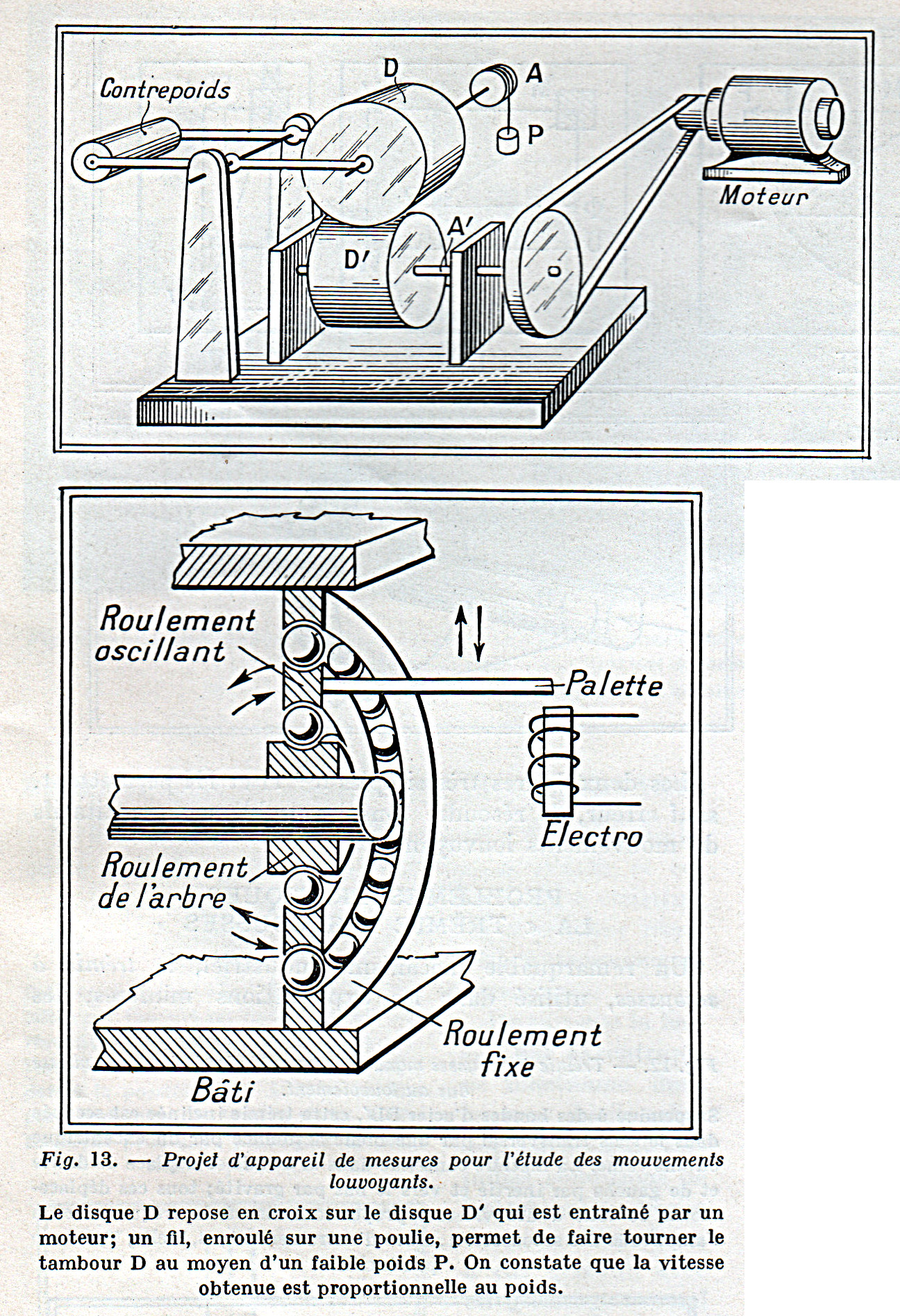
L’appareil peut être réalisé très simplement (fig. 13) au moyen de deux disques D et D’ en acier ou en matière quelconque à coefficient de frottement régulier ; ces disques possèdent des axes orthogonaux A et A’ montés sur pointes ou sur billes ; ils se touchent en croix à leur périphérie et l’axe supérieur est porté par un fléau mobile permettant au disque D d’appuyer sur le disque inférieur D’.
Ce disque D’ étant entraîné à vitesse constante par un petit moteur ou un rouage à moulinet, on constate que le disque D peut être mis en rotation au moyen d’une petite surcharge P dont le fil est enroulé sur l’axe A ou sur une poulie. Cette surcharge étant choisie suffisamment petite pour que le mouvement de D ne puisse se produire quand D’ est au repos, on a l’équivalent d’un engrenage hyperboloïde ; mais le rapport de cet engrenage n’est pas constant ; il est proportionnel à l’effort P, autrement dit la vitesse de D est proportionnelle à l’effort exercé pour la produire, ce qui constitue la grande originalité des mouvements louvoyants.

Une telle proportionnalité est assez exceptionnelle en mécanique ; on la trouve, sous une forme plus ou moins rigoureuse, dans certains mouvements au sein des fluides visqueux ainsi que dans les freinages magnétiques par courants de Foucault (fig. 14). Enfin la vitesse précessionnelle de l’axe d’un gyroscope est proportionnelle au couple de renversement appliqué à cet axe ainsi qu’à la vitesse de rotation du volant (fig. 14.) ; l’analogie arithmétique avec les mouvements louvoyants est ici complète, mais il faut noter que le déplacement précessionnel est perpendiculaire à la force appliquée, au lieu que dans le louvoiement le corps sollicité se déplace partiellement le sens de la force.
Louvoiement de rotation
Le louvoiement n’est pas spécial au frottement de glissement, puisque son essence est simplement que le sollicité se déplace suivant la résultante en présence d’une résistance passive approximativement isotrope. Il s’applique donc au roulement orientable, c’est-à-dire aux billes ; toutefois, nous n’en avons rencontré ici aucun exemple.
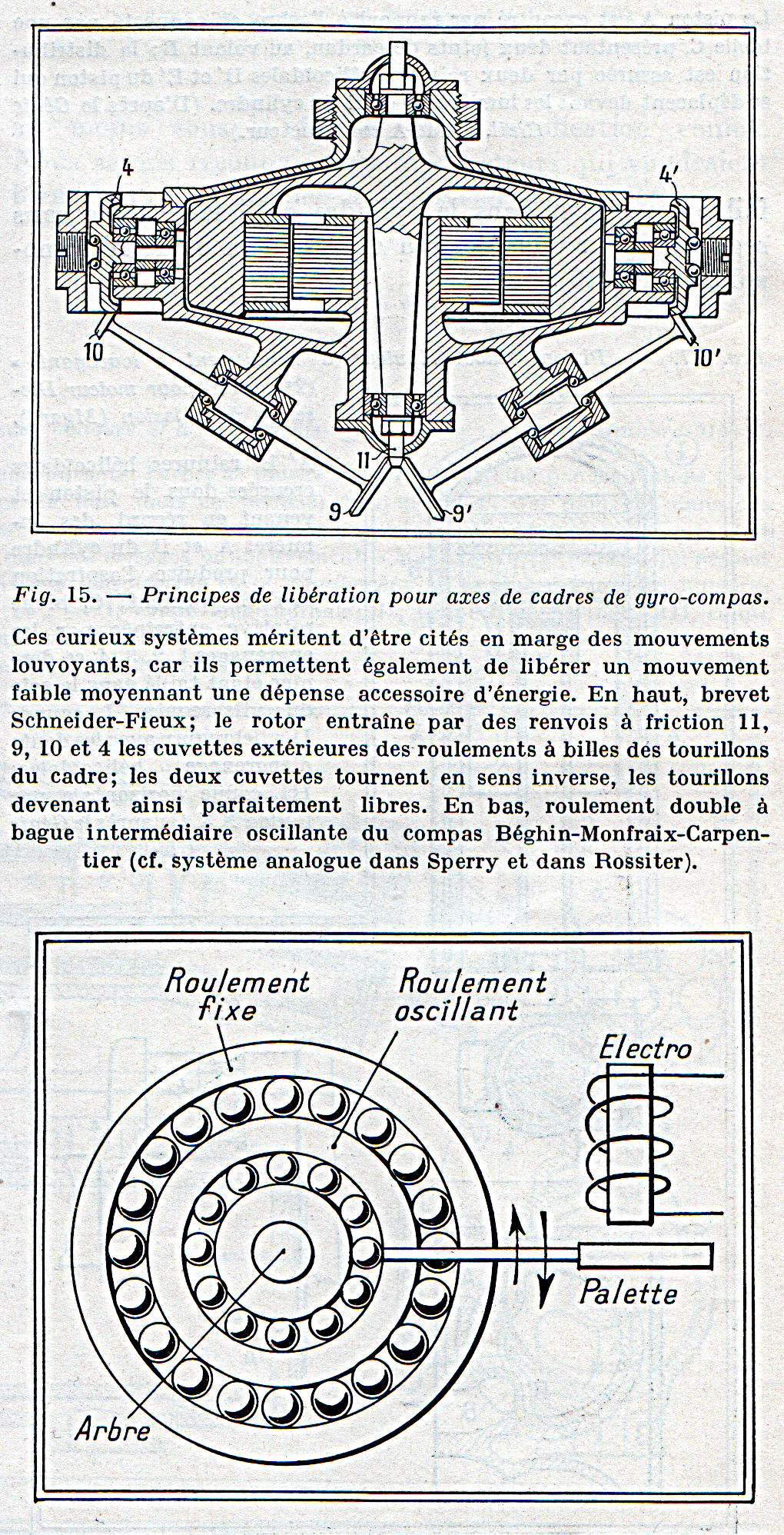
Nous donnons figure 15 deux exemples de « libération » ou « activation » de roulements à billes qui ne sont pas de véritables mouvements louvoyants.
Compresseur louvoyant Myard
La nécessité, d’ordre purement utilitaire, d’obtenir de l’air comprimé rigoureusement exempt d’huile, a conduit M. Myard à étudier un compresseur à piston ne comportant presque aucun graissage du cylindre (un graisseur Stauffer à graisse consistante). Le principe du louvoiement, si toutefois ce terme est ici justifié, a permis d’établir un compresseur avec un jeu tellement faible du piston dans le cylindre qu’il fonctionne sans segments pour une pression de refoulement de 10 atmosphères (fig. 16).

La figure 16 montre une coupe schématique de cette curieuse machine. Le piston A est relié au volant B par une bielle C articulée avec un cardan à ses deux extrémités ; l’arbre du volant est déporté par rapport à l’axe. Il en résulte pour le piston un double mouvement de rotation continue et de translation alternative. Deux cannelures hélicoïdales D’ et E’, creusées dans le piston, assurent la distribution en se déplaçant devant les orifices D et E du cylindre, en sorte que ce compresseur paradoxal n’a ni segments, ni tiroir, ni soupapes !
Sur un modèle d’études, le piston avait été ajusté à dessein très serré dans le cylindre ; coulissement longitudinal et rotation étaient également fort durs à obtenir à la main et il est incontestable qu’avec un pareil serrage, un compresseur ordinaire aurait infailliblement grippé. Par contre, le fonctionnement fut excellent et, au démontage, on trouva que les deux pièces avaient acquis un poli parfait.
Mouvements hélicoïdaux
Ici, une observation s’impose ; un mouvement hélicoïdal n’est pas forcément un mouvement louvoyant pas plus, sur un plan, qu’un mouvement oblique.
Reprenons le cas simple et général du corps pesant posé sur un plan (fig. 3). L’essence du mouvement louvoyant est l’indépendance complète des deux déplacements, la proportionnalité des vitesses aux efforts s’établissant d’elle-même. Si les deux déplacements sont liés d’une façon rigide, on peut les remplacer par un déplacement unique, imposé et dirigé suivant la résultante. Il manque alors ce fait capital que, grâce au déplacement auxiliaire, le déplacement principal peut s’effectuer avec une dépense d’énergie très faible. De même, le mouvement d’un obus dans un canon rayé ou d’une vis dans son écrou n’est pas louvoyant mais hélicoïdal ; ils n’ont qu’un degré de liberté.
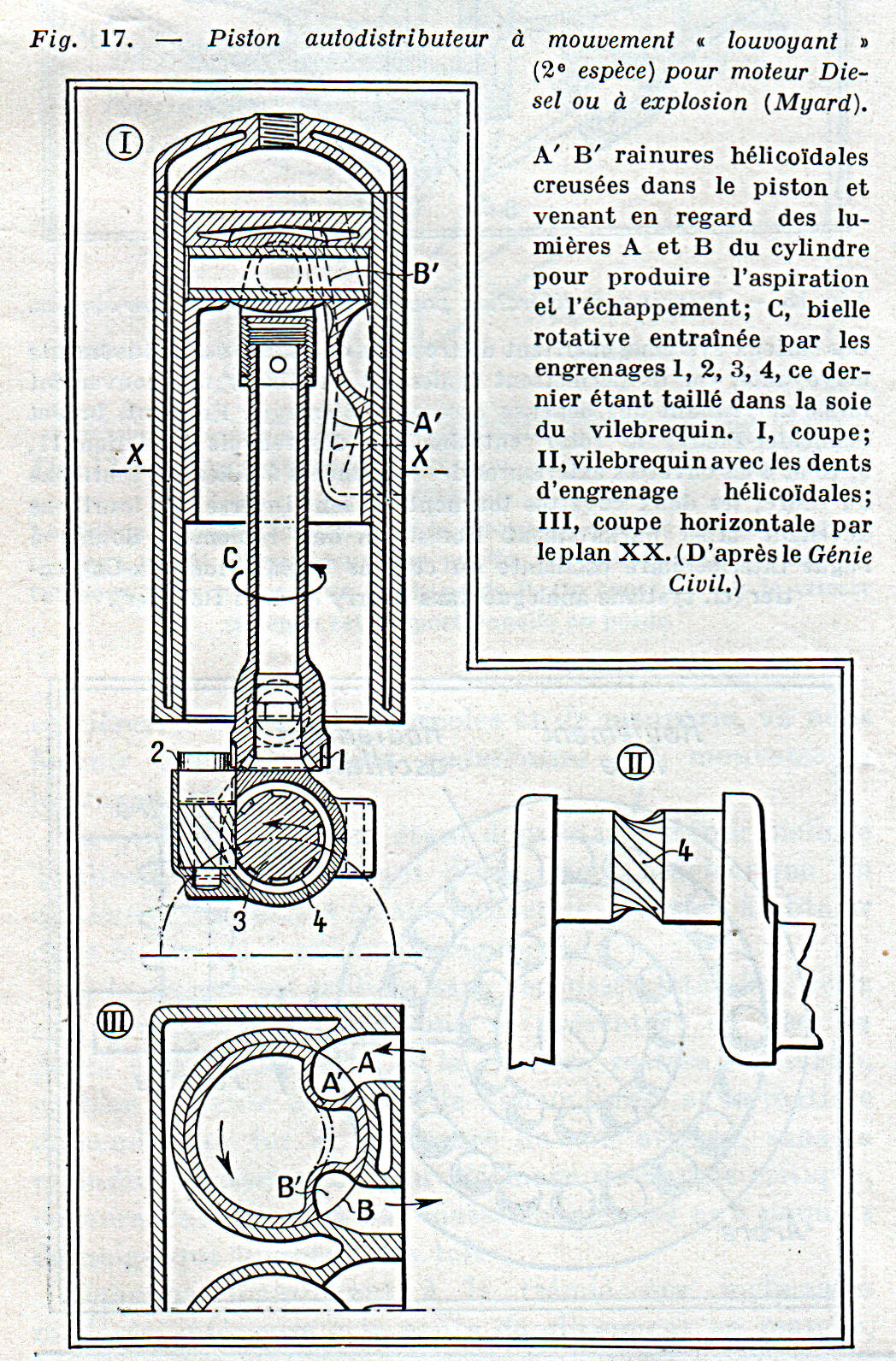
Cependant, les mouvements dont le compresseur Myard fournit un exemple (voir aussi le Diesel fig. 17) présentent des avantages pratiques indéniables ; M. Myard a pu montrer les modifications favorables qu’ils permettent d’apporter à la théorie générale des jeux, si importante dans la construction mécanique. Il y a là une catégorie spéciale de mouvements que l’on peut appeler « louvoiement avec liaisons rigides » (desmodromiques) ou « mouvements louvoyants de deuxième espèce ».
Moteurs Diesel à pistons louvoyants
M. Myard vient de breveter un système de pistons louvoyants pour moteur Diesel ou à explosion, fonctionnant à quatre temps sans soupapes et avec un nombre quelconque de cylindres (fig. 17) .
La caractéristique de ce moteur est que les pistons, outre leur mouvement alternatif ordinaire, possèdent un mouvement de rotation continue emprunté, grâce à des engrenages, à la soie du vilebrequin qui tourne dans la tête de bielle : la rotation est de 1/2 tour seulement pour une double course (aller et retour) du piston, ce qui permet d’obtenir, ici encore, la distribution par des rainures hélicoïdales. Ce mode de distribution présente des avantages techniques incontestables, notamment celui de dégager la culasse qui peut être rendue hémisphérique.
On peut escompter, dans ce type de moteur, des possibilités d’ajustage extrêmement serré, permettant la marche sans segments avec un graissage minime.
Pompe à joint de Kœnigs
Nous avons gardé pour la fin une très curieuse machine, la pompe à blocs louvoyants formant joint de Kœnigs (brevet Guinard-Myard), destinée à pomper sans graissage les liquides tels que l’essence, qui dissolvent l’huile et la graisse.
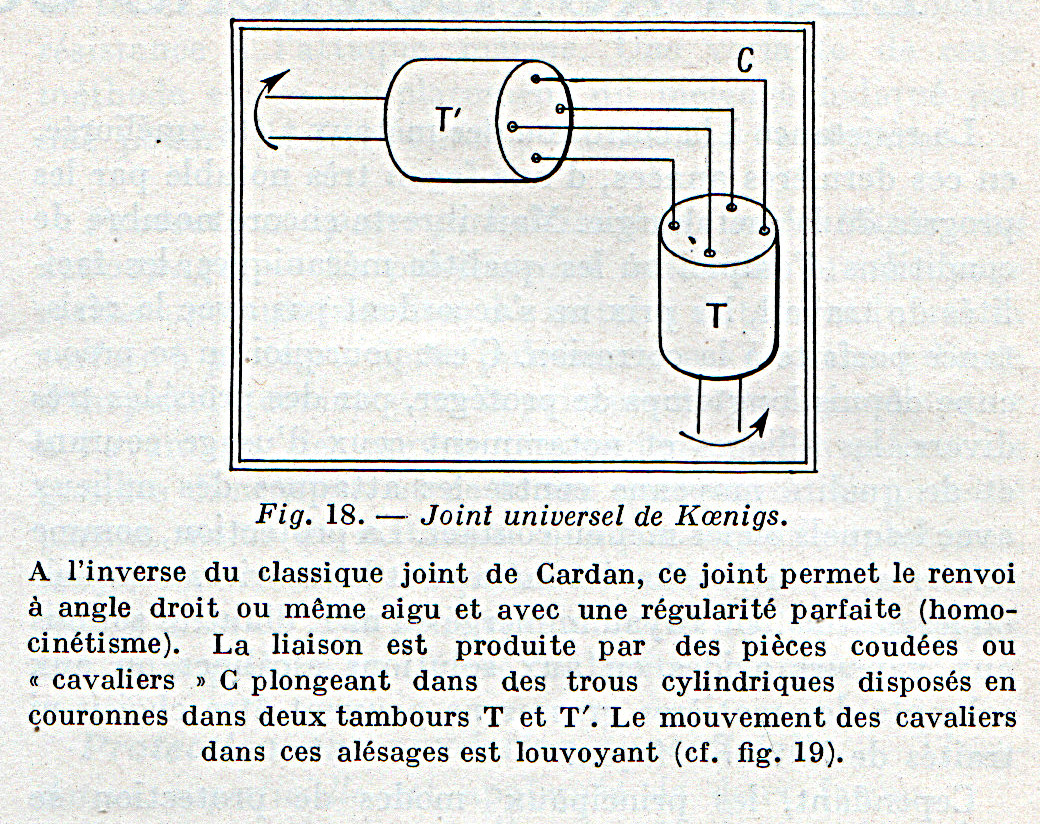
On sait que le joint de Koenigs, beaucoup moins connu que le classique joint de Cardan, permet des renvois de mouvement à angle droit et même à angle aigu et cela avec une parfaite régularité, comme un engrenage (fig.18).
M. Myard a remarqué que les blocs coudés ou « cavaliers » qui assurent la jonction des deux tambours mobiles montent et descendent dans leurs logements avec un véritable mouvement de louvoiement. Il devait donc être possible de les employer comme pistons sans graissage.
La figure 19 montre comment cette conception a pu are réalisée pratiquement.
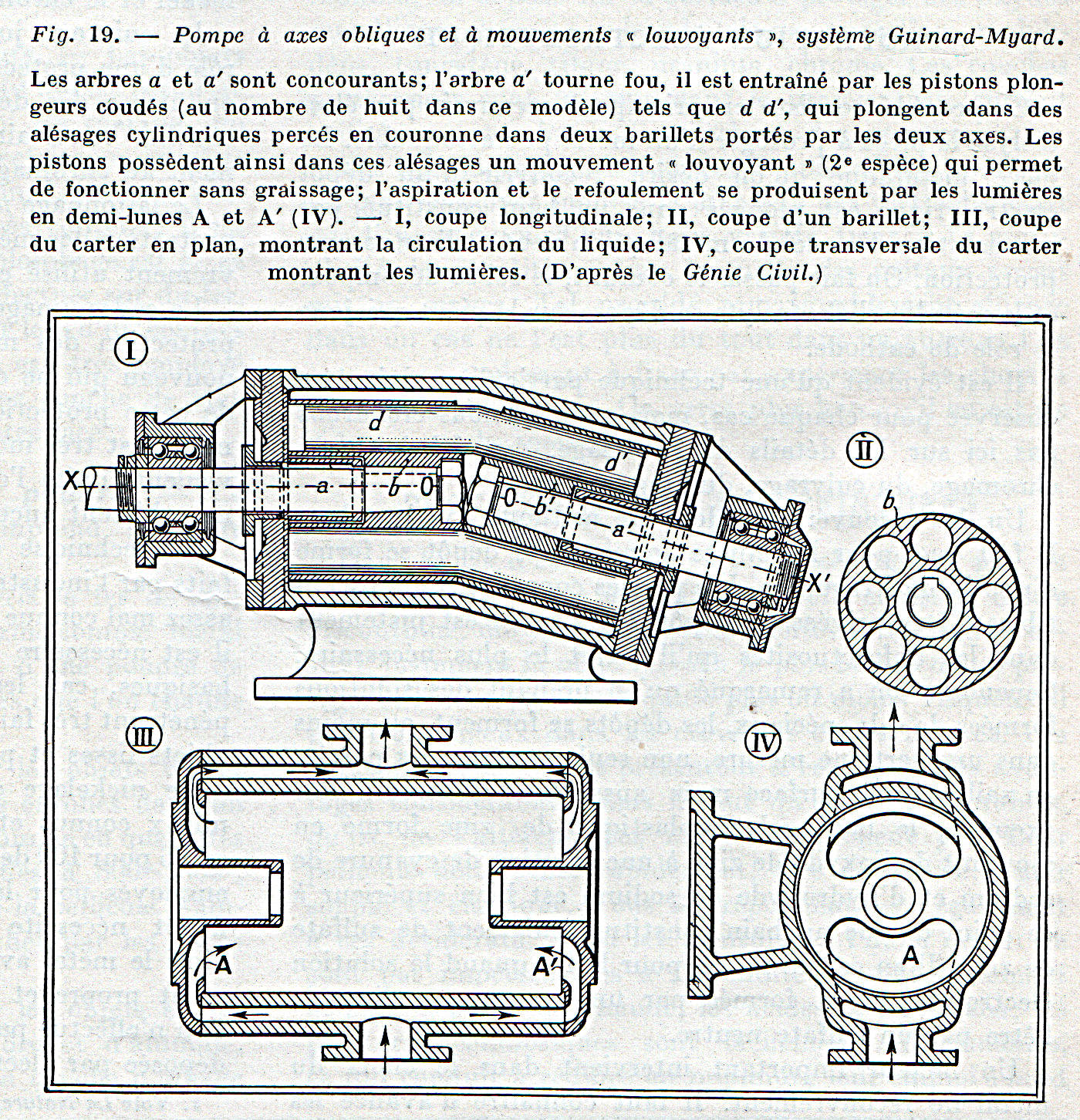
Les deux axes OX et OX’ des arbres a et a’ sont concourants mais obliques ; l’arbre a est entraîné par le moteur tandis que a’ tourne fou.
Ces arbres portent deux barillets b et b’ percés de trous cylindriques disposés en couronne, dans lesquels plongent les blocs coudés tels que d d’ ; ces blocs coudés assurent la liaison rotative entre les deux barillets tout en engendrant de petits volumes d’aspiration à la partie supérieure de leur course circulaire.
Cette aspiration suivie de refoulement se produit simultanément aux deux extrémités des blocs-pistons en sorte que l’on a en réalité deux pompes.
On a donc prévu dans chaque flasque une lumière d’aspiration et une lumière de refoulement.
Nous arrêtons ici cet aperçu sur une question délicate mais curieuse et qui mérite d’être étudiée plus attentivement.
Les mouvements louvoyants sont assez rares dans la mécanique, tout au moins sous la forme d’une application voulue. Nous serons reconnaissants aux lecteurs qui voudraient bien nous en signaler de nouveaux exemples.
Pierre Devaux, Ancien élève de l’École Polytechnique.
