Le sondage de la mer apporte une aide précieuse à la navigation. Souvent les navires se déplacent dans le brouillard, les nuages leur cachent les étoiles, la brume dissimule des obstacles dangereux et ne permet pas de recevoir les rayons des phares. Les communications par T. S. F. et la radio-goniométrie permettent évidemment de déterminer approximativement le point, c’est-à-dire l’endroit où se trouve le navire, mais pour cela il est nécessaire que des radio-phares se trouvent installés à proximité.
Le sondage des fonds indique aux navigateurs s’il existe au voisinage des obstacles dangereux, mais, par contre, la sonde est assez difficile à manœuvrer et son maniement est très lent. On a cherché en ces dernières années à construire des appareils qui permettent de connaître presque immédiatement la profondeur du fond de la mer à l’endroit où se trouve le navire.
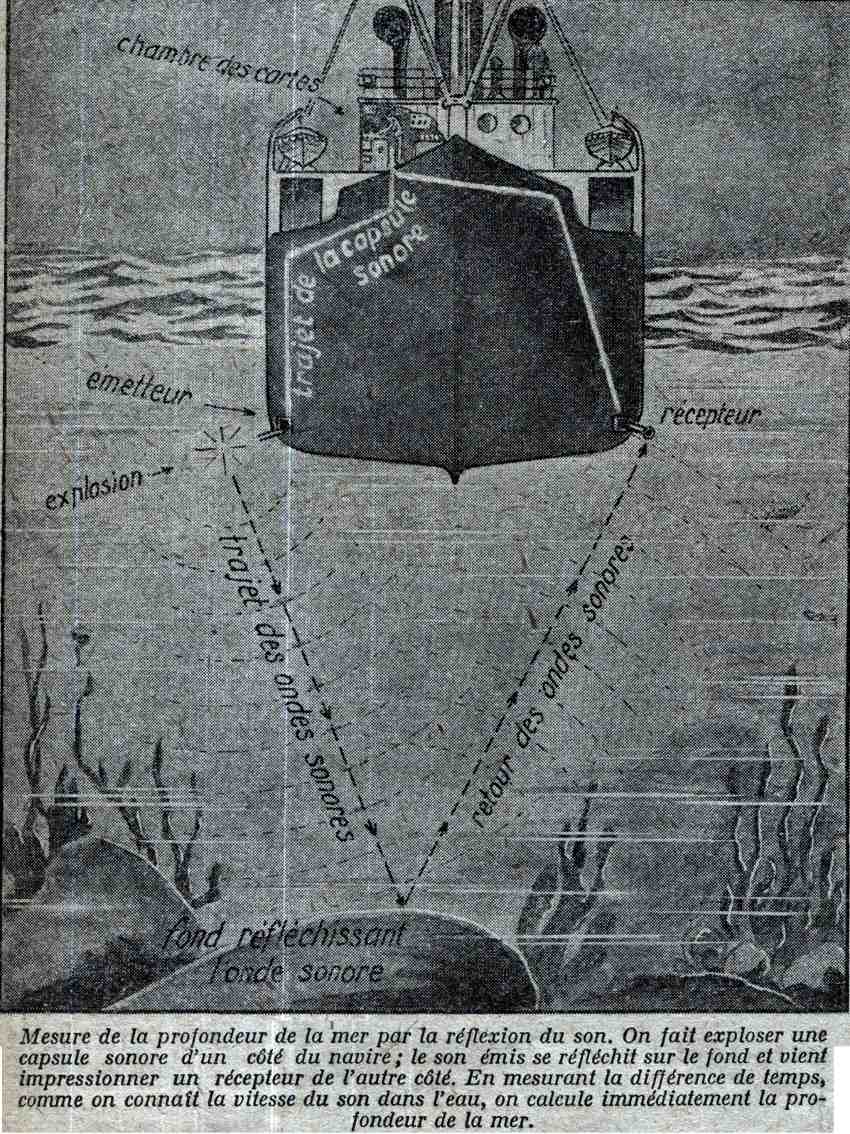
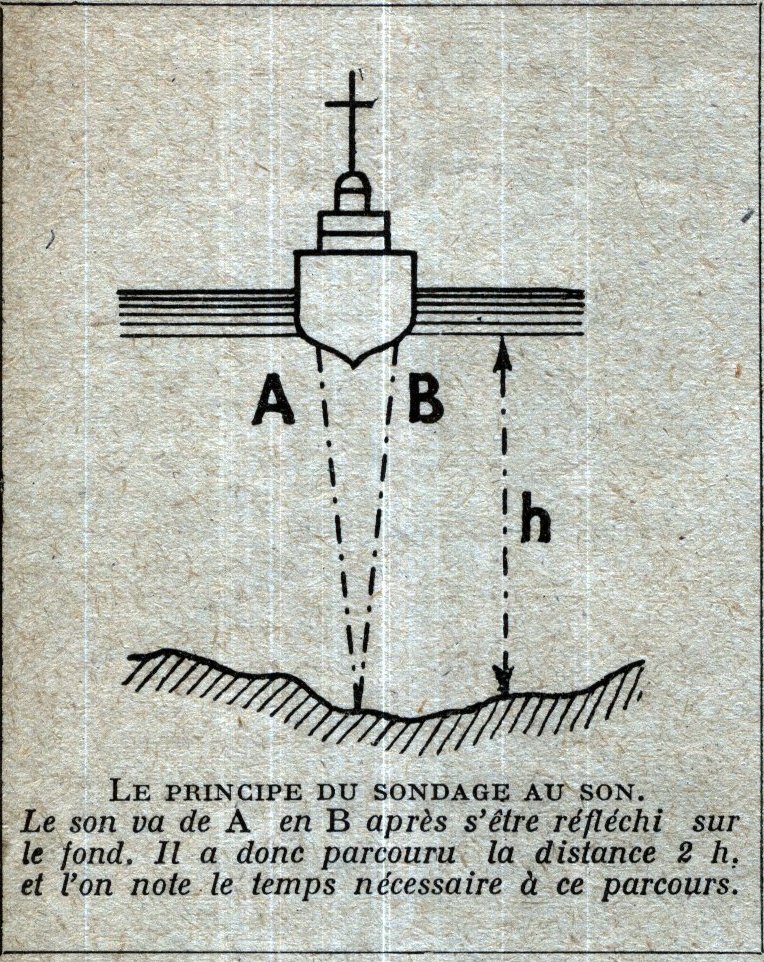
Les premiers modèles qui ont résolu ce problème sont dus à des Allemands et sont basés sur la réflexion des ondes sonores. On détermine l’intervalle de temps qui sépare l’émission d’un son de la perception de l’écho. Étant donnée la vitesse du son dans l’eau, qui est de 1435 mètres par seconde, on peut trouver par une simple multiplication la distance du bateau au fond sous-marin.
Le navire porte sur le côté un émetteur d’ondes sonores ; c’est un petit appareil à explosion ; sur l’autre côté, il porte un récepteur qui est relié à un appareil indicateur dans la chambre des cartes du navire. Un réservoir à cartouches permet de faire descendre une cartouche dans une embouchure analogue à celle des tuyaux acoustiques ; la cartouche en s’introduisant pousse un verrou sur lequel le fond s’appuie. L’amorce peut être alimentée électriquement et la charge pousse la capsule sonore munie d’une fusée. Au départ, la fusée s’enflamme, elle est tirée en l’air à la vitesse de 50 mètres par seconde ; après avoir traversé l’air, elle continue à brûler sous l’eau, elle fait exploser la capsule au point voulu, c’est-à-dire à 1 ou 2 mètres de profondeur.
Le récepteur est constitué par un dispositif chronométrique qui enregistre le temps de l’explosion et celui de la réception (cette inscription exige une précision rigoureuse) ; c’est un micro-chronomètre. La réception du son se fait au moyen d’un microphone très sensible qui, aussitôt qu’il reçoit l’onde réfléchie formant l’écho, déclenche l’appareil du microchronomètre ; une aiguille se déplaçant sur un cadran permet de déterminer exactement l’intervalle de temps écoulé entre le départ du coup et l’arrivée de l’écho ; il est gradué en mètres de profondeur.
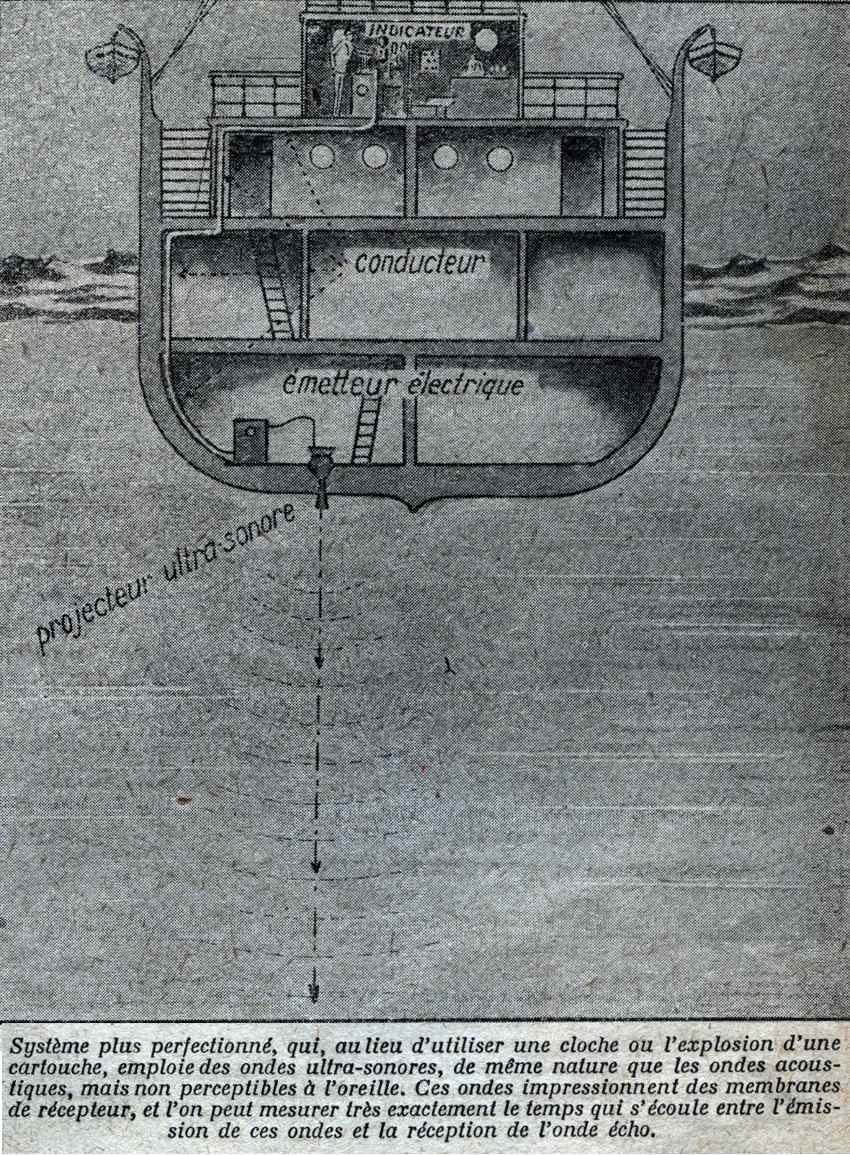
Des procédés plus récents utilisent également les ondes sonores, mais produites à des fréquences telles qu’elles ne sont plus sensibles à l’oreille ; ce sont des ! ondes ultra-sonores ou des ultra-sons dont la vitesse de propagation est la même que celle des ondes acoustiques perceptibles à l’oreille.

L’avantage de l’adoption d’ondes de fréquence aussi faible vient de la plus grande portée que ces ondes sont susceptibles d’avoir avec une puissance d’émission égale. De plus, pour apprécier l’intervalle de temps qui sépare l’émission de ce son ou d’un signal de la réception de l’écho, il est indispensable que les ondes’ n’aient pas une trop grande vitesse, ce qui se présente par exemple pour les ondes hertziennes, qui se déplacent à raison de 300000 kilomètres par seconde. Les ondes sonores, qui vont beaucoup plus lentement, sont donc les seules utilisables pour cette opération du sondage par le son. S’il s’agit d’apprécier une profondeur de 1 500 mètres, l’intervalle de temps entre l’émission et la réception de l’écho sera à peu près de deux secondes.
Les ondes sonores furent employées il y a déjà nombre d’années et étaient produites par des cloches. Ces méthodes, qui ont permis de reconnaître des fonds de 8 000 mètres, ont l’inconvénient d’émettre des sons dont la période de vibration est de 1/1000. Pour avoir un signai perceptible à l’oreille, ce signal doit donc durer un certain nombre de millièmes de seconde, par exemple un centième de seconde et, pendant ce temps, l’onde a déjà parcouru 15 mètres. On ne peut donc mesurer que des distances relativement Importantes. De plus, l’appareil d’émission ne peut pas avoir de dimensions considérables.

Comme les ondes se trouvent émises dans toutes les directions, l’indication de la profondeur qui est obtenue n’intéresse pas uniquement l’endroit exact au-dessus duquel se trouve le bateau ; il fait intervenir également les fonds environnants. Pour avoir l’indication précise du fond en un point, l’émission sonore doit être dirigée. Pour cela, on fait déplacer les ondes à travers un orifice, la source émettrice étant placée devant un miroir. Cette concentration des ondes émises est commode non seulement pour le sondage par le son, mais entre autres pour la signalisation acoustique dirigée.
Les ondes émises par des cloches, pour être efficaces, sont obtenues au moyen d’appareils dont la puissance atteint plusieurs chevaux, et l’on a le désagrément de produire à bord du navire un bruit infernal.

C’est un Anglais, Richardson, qui pensa à appliquer des ondes sonores de haute fréquence, de manière qu’elles ne soient plus perceptibles par l’oreille de l’opérateur. Le premier essai de production de ces ondes était mécanique. Parsons, en Amérique, établit une sirène hydraulique de fréquence élevée, mais ce ne fut que vers la fin de 1914 que M. Schilowsky pensa à utiliser une source électro-magnétique, car les fréquences employées en T. S. F. sont du même ordre que celles qui sont avantageuses pour la signalisation.
Il suffit donc de transformer les oscillations électriques en oscillations élastiques, c’est-à-dire de produire un mouvement mécanique alternatif par transformation de courant alternatif. On frappe alors l’eau 40000 fois par seconde et l’inventeur avait pensé prendre une surface constituée par une grande membrane de récepteur téléphonique, mise au contact de l’eau et excitée par un courant de 40 000 périodes, la réception étant alors obtenue par un microphone.
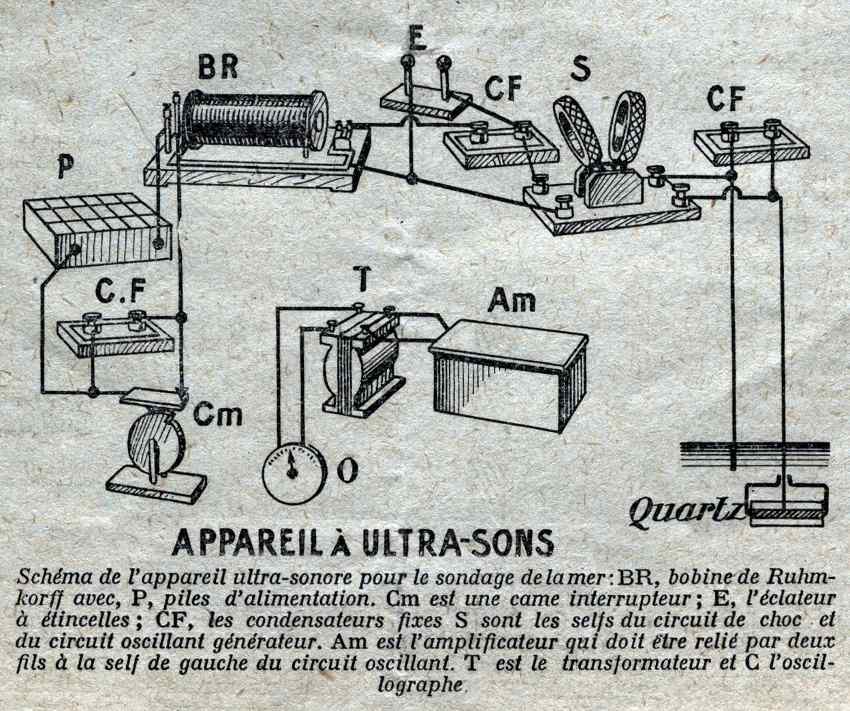
MM. Langevin et Perrin apportèrent leur contribution à cette idée en essayant tout d’abord le condensateur chantant, puis en utilisant les propriétés électriques particulières du quartz.
Ces propriétés ont été découvertes en 1880 par Pierre et Jacques Curie. Si, dans un cristal de quartz, on taille une lame perpendiculaire à l’une des diagonales de l’hexagone, on on constate que, si l’on comprime cette lame, on arrive à produire un courant électrique. Par exemple, en mettant deux feuilles de papier . d’étain de chaque côté de la lame de quartz, . quand on fait pression sur cette lame, le condensateur fait passer un courant dans le circuit qui réunit ces deux électrodes.
Si l’on supprime la pression sur la lame, on obtient un courant de sens inverse de celui du premier.
Supposons maintenant que des ondes ultra-sonores viennent écraser le quartz périodiquement sur une face : on obtiendra un courant périodique dans le circuit relié aux deux feuilles du condensateur ; ce courant peut être amplifié par résonance, au moyen de bobinages de self de valeur convenable. Les lampes à trois électrodes interviennent encore pour l’amplification et l’on obtient alors une solution pratique du problème.
Ce phénomène est d’ailleurs inverse si l’on applique aux électrodes du condensateur une différence de potentiel, c’est-à-dire que, si l’on charge ce condensateur, le quartz se trouve écrasé ; si le condensateur se décharge, le quartz se détend.
Pour obtenir ce résultat, on a trouvé qu’il fallait une différence de tension de près de 60 000 volts, chose difficilement applicable à bord d’un navire ; on a diminué cette tension et on l’a réduite à 12000 volts en faisant vibrer le courant électrique en accord avec la vibration élastique de la lame.
Pour faciliter cela, on utilisa les propriétés élastiques d’une lame d’acier. Cette lame forme couvercle d’une boîte étanche, et une mosaïque de quartz est collée entre deux plaques d’acier, l’une intérieure, l’autre constituant le couvercle ; de cette manière on peut réduire la tension à 2 500 volts.
Pour déterminer les temps, c’est-à-dire la distance qui sépare l’émission et la réception, le courant de charge du condensateur produit un courant induit dans les enroulements d’un transformateur. Ce courant, amplifié au moyen de lampes de T. S. F., est enregistré dès que l’écho revient. La courbe tracée change et il se produit un crochet accentué dès qu’on a reçu la première onde réfléchie. On connaît donc le nombre de secondes qui s’est écoulé.
Dans les premiers essais, la portée obtenue a été de 9 kilomètres ; on est arrivé à repérer des corps flottants à une distance de 2 000 mètres. Les fonds peuvent être déterminés d’une façon exacte entre 6 mètres et 450 mètres. Si l’on veut avoir une mesure précise, le temps doit être mesuré exactement. Pour cela, on produit une étincelle dans le circuit primaire d’une bobine de Ruhmkorff, puis on lance le train d’ondes émettrices et le quartz émet un train d’ondes ultra-sonores qui dure un millième de seconde, Un interrupteur commande cette émission ; celle-ci, au moyen d’un amplificateur, envoie un courant dans l’oscillographe inscripteur. Lorsque l’écho revient, il provoque une nouvelle division sur l’appareil indicateur et l’on obtient la distance sur l’échelle avec une précision de l’ordre du mètre.
Dans l’appareil à écouteur direct, on mesure l’intervalle de temps par l’intermédiaire de la quantité d’électricité qui passe dans un appareil de mesure électrique.

Si l’on fait circuler dans cet appareil un courant constant à partir du commencement de l’intervalle du temps à mesurer, en le coupant à la fin, l’indication donne une valeur proportionnelle au temps. Ceci s’obtient au moyen de deux lampes à trois électrodes couplées.
Le fonctionnement est rapide. On peut employer des trains d’ondes courtes, chose essentielle pour sonder à faible distance. On a pu obtenir ainsi, dans une simple cuve, la mesure de profondeur de 1 mètre.
