La technique de l’hélicoptère
L’idée d’utiliser des hélices sustentatrices pour soulever et diriger des appareils aériens est fort ancienne puisque nous trouvons déjà dans les notes et dessins de Léonard de Vinci des schémas d’appareils utilisant ce principe. Au XIXe siècle lorsque, grâce aux ballons, l’homme commença réellement à pouvoir s’élever dans l’espace, des chercheurs : Ponton d’Amécourt, Forlanini, etc., dont la dernière Exposition des Souvenirs de l’Aviation nous a rappelé les noms - s’attaquèrent au problème par des moyens différents. A l’époque des premiers « aéroplanes », Breguet, Renard, Santos-Dumont, Cornu, le vicomte Decazes illustrèrent l’histoire de l’hélicoptère, et, plus près de nous, les tentatives d’Oemichen, de De Bothézat, du marquis de Pescara sont encore présentes à notre esprit.
Jusqu’ici, pour des considérations de principe, pour des raisons constructives ou simplement financières, aucun dispositif n’a réussi à s’imposer, mais, étant donné les immenses services que rendrait un appareil permettant des décollages et atterrissages verticaux, toute étude de ce genre doit être suivie avec intérêt.
Le constructeur d’hélicoptère doit s’attacher à résoudre trois questions primordiales ; rendement aérodynamique - stabilité et maniabilité autour des trois axes - sécurité des organes mécaniques.
Comme les formules générales de l’hélice propulsive sont applicables aux hélices sustentatrices on montre qu’un certain coefficient q appelé qualité sustentatrice permet de servir de commune mesure entre différents systèmes de sustentateurs : $$$ q = \frac{\alpha^{\frac{3}{2}}}{\beta}$$$ ( α et β coefficients de traction et de puissance)
Plus cette qualité sustentatrice est grande pour un diamètre donné, plus la charge soulevée par cheval sera importante ; le premier point sera donc de déterminer la valeur de ce coefficient pour le système proposé.
La seconde question - et non la moindre puisque de nombreux hélicoptères doivent leur échec aux difficultés que les inventeurs ont rencontrées pour la résoudre - est relative à la stabilité.
On dit qu’un appareil est stable si, après l’action d’un couple perturbateur qui détruit l’état d’équilibre des forces en présence ; l’appareil revient à sa position de marche normale à la suite de quelques oscillations décroissantes de faible amplitude.
De plus il faut que l’appareil soit maniable, c’est-à-dire qu’il obéisse immédiatement aux manœuvres du pilote dans toutes les évolutions possibles.
Il fallu 30 années d’expériences pour rendre l’avion moderne à peu près stable dans certaines limites d’incidence, il n’est donc pas étonnant que la stabilité des hélicoptères ait donné lieu à quelques déboires.
Enfin, comme les hélicoptères comportent des hélices à grand diamètre, une parfaite connaissance de l’intensité, de la direction, de la position et de la période des efforts est nécessaire pour appliquer judicieusement les lois de la résistance des matériaux et de l’élasticité.
Nous allons voir comment l’ingénieur Florine a abordé et résolu ces divers prohlèmes au laboratoire aérodynamique belge de Rhode St-Génèse.
Principe de l’hélicoptère Florine
La théorie et l’expérience montrent que toute voilure tournante qui prend appui sur l’air subit de la part de celui-ci un certain couple appelé couple de réaction dont l’utilisation dans le banc-balance pour mesurer la puissance des moteurs avec moulinet Renard est un exemple frappant.
Si l’hélicoptère ne comportait qu’une seule hélice, le couple de réaction ferait tourner le bâti qui la supporte en sens inverse de la rotation de l’hélice, ce qui serait plutôt gênant pour les passagers !... Pour annuler le couple de réaction, divers constructeurs ont associé deux hélices dé mêmes caractéristiques, tournant en sens inverse de façon à annuler les deux couples de réaction, mais les couples aérodynamiques et gyroscopiques qui concourent à la stabilité s’annulent également, rendant la stabilité des machines vraiment précaire.
M. Florine s’est résolument écarté des sentiers battus en employant deux hélices tournant dans le même sens, placées assez loin l’une de l’autre à chaque extrémité d’un bâti rigide. Cette disposition présente l’avantage d’utiliser en marche ascendante chaque hélice à plein rendement, puisque aucune interférence aérodynamique ne se produit entre elles ; de plus elle permet de résoudre élégamment,par l’inclinaison des axes, l’équilibre des couples de réaction et d’assurer par ce même moyen la stabilité et la maniabilité de l’appareil.
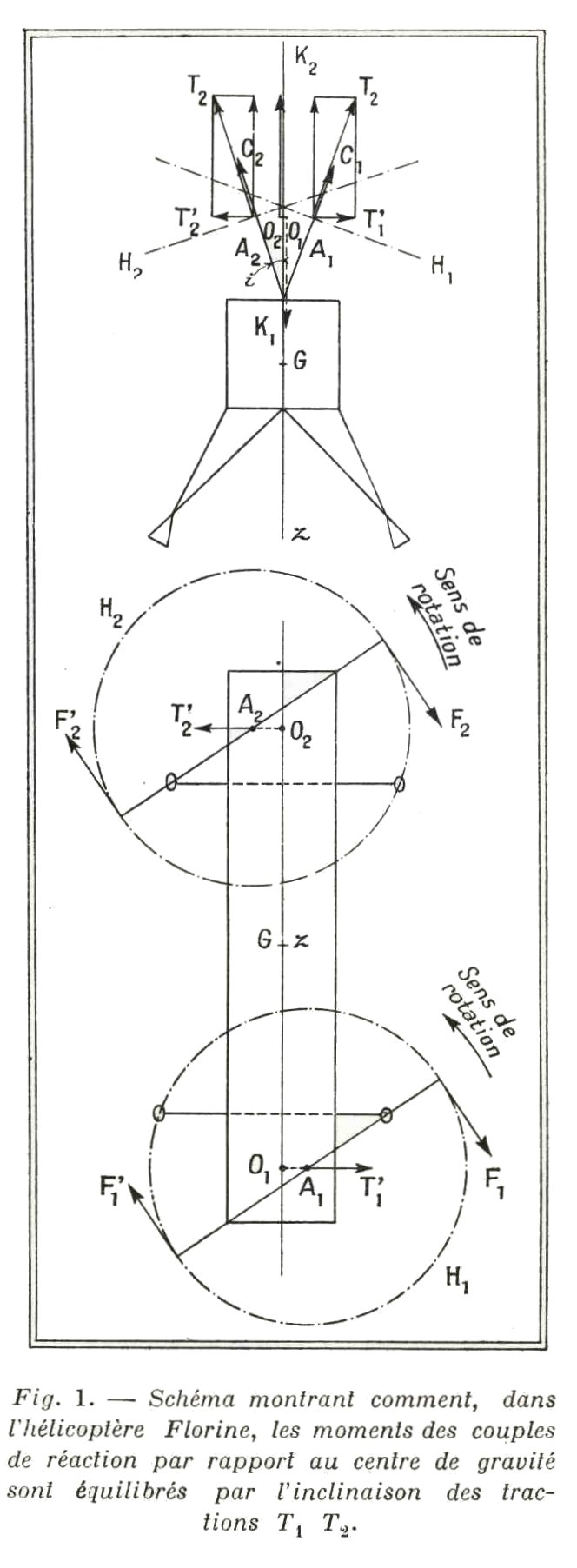
Nous allons examiner rapidement en nous aidant du schéma de la fig. 1 comment s’équilibrent les principaux couples.
Les deux hélices H1 et H2 étant inclinées du même angle de part et d’autre de la verticale i auront des tractions T1 et T2 égales si elles tournent au même nombre de tours, et si leurs couples de réaction F1 F1’, et F2 F2’ sont identiques.
Si nous projetons T1 et T2 sur un plan horizontal passant par les moyeux A1 et A2 , nous obtiendrons deux forces égales et parallèles, mais dirigées en sens contraire. Ces forces donnent un couple par rapport à l’axe Gz perpendiculaire à leur plan et passant par le centre de gravité ; ce couple peut être représenté par le vecteur K1.
De même si nous projetons les couples de réaction sur le même axe Gz et que nous les composons, le vecteur résultant K2 sera dirigé en sens inverse de K1. Pour des valeurs bien déterminées deT1 et T2 et de l’angle i d’inclinaison des axes de rotation, on conçoit que les vecteurs représentatifs K1 et K2 soient égaux et de signe contraire et que le système de forces et de couples soit en équilibre.
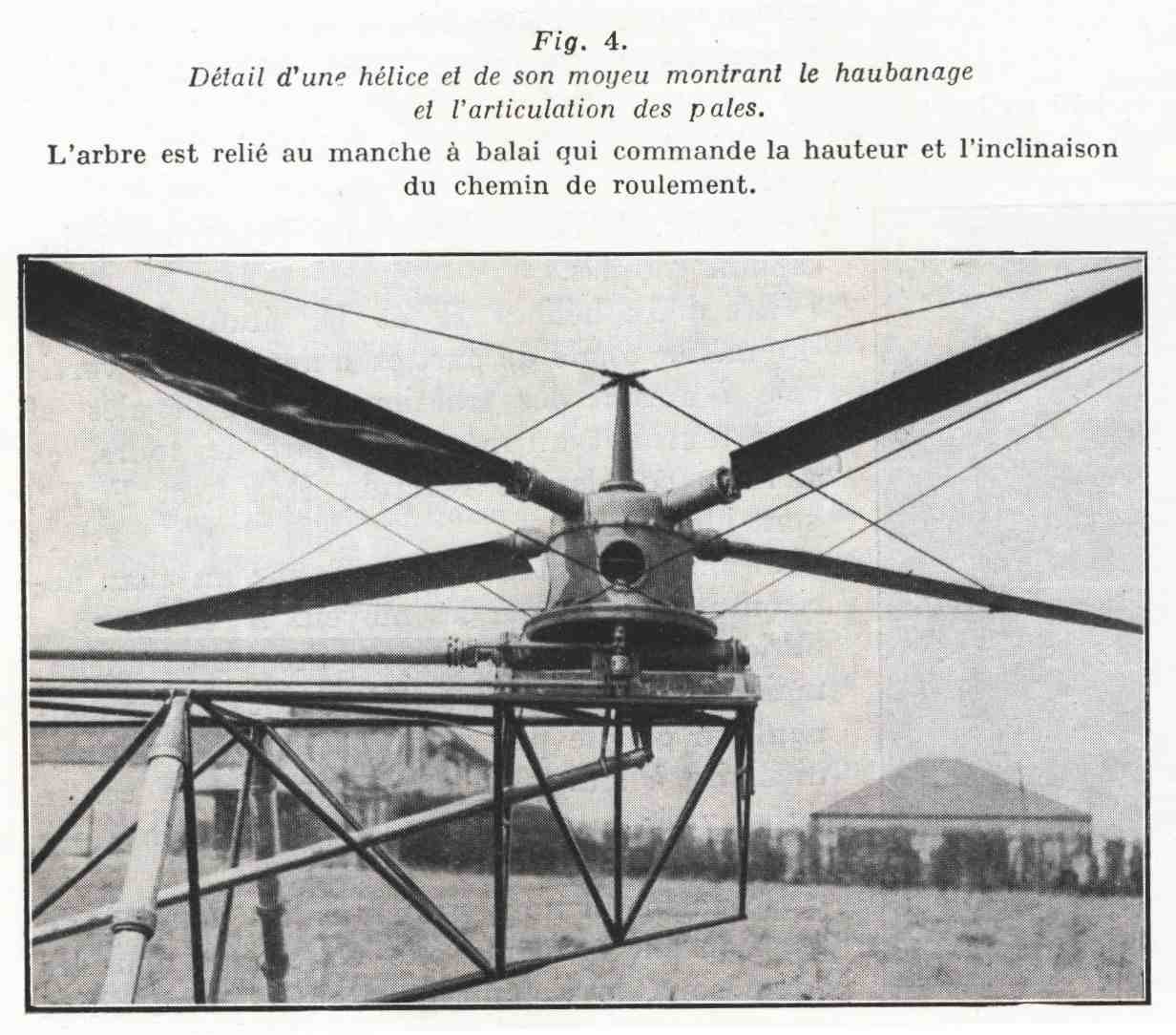
Après avoir montré comment l’équilibrage des couples de réaction est obtenu, examinons maintenant une autre particularité de l’appareil Florine. Lorsqu’un hélicoptère se déplace en translation suivant une trajectoire sensiblement horizontale, toutes les pales de sa voilure tournante ne subissent pas à un instant donné des efforts identiques. Celles qui avancent contre le vent relatif sont attaquées à une vitesse plus grande que celles qui s’effacent dans le vent. Il en résulte, sur des pales rigidement fixées au moyeu, des variations périodiques d’efforts qui fatiguent les matériaux et assemblages et peuvent amener leur rupture sous l’action de vibrations ou de phénomènes de résonance. Pour éviter ces graves difficultés M. Florine a articulé les pales de ses voilures autour des moyeux de façon que chaque pale soit astreinte à une variation d’incidence pendant un tour complet.
Comme on sait que la force aérodynamique est proportionnelle au carré de la vitesse et à l’angle d’attaque du profil, en diminuant l’incidence lorsque la vitesse augmente, on peut obtenir sur chaque élément une résultante aérodynamique à peu près constante.
Cette possibilité de commande d’incidence des pales permet également de produire un moment de roulis dans le sens que l’on désire.
Description des appareils Florine
Comme il est généralement d’usage pour toute étude de machine nouvelle, l’application des principes que nous venons d’exposer ne s’est pas faite sans écueils.
L’examen des travaux successifs de M. Florine montrera avec quel courage et quelle ténacité celui-ci a réussi à triompher de nombreuses difficultés de tout ordre.
Dès 1927 des essais de modèles réduits possédant des hélices de 0m60,actionnées par des moteurs électriques permirent de vérifier la théorie sustentatrice et d’expérimenter le fonctionnement du système de variation d’Incidence des pales. Puis un modèle de plus grandes dimensions comportant des hélices de 3m de diamètre toujours commandées par des moteurs électriques souleva à plusieurs reprises son poids de 36 kg.
Ces essais préliminaires ayant donné satisfaction après quelques mises au point de détail, la construction d’un appareil pouvant enlever son pilote fut décidée. Cette machine (fig. 2) se composait d’un hâti en bois supportant deux hélices de 7m20 de diamètre et de 0m60 de profondeur mises en mouvement par un moteur Hispano Suiza de 180 ch à refroidissement par eau.
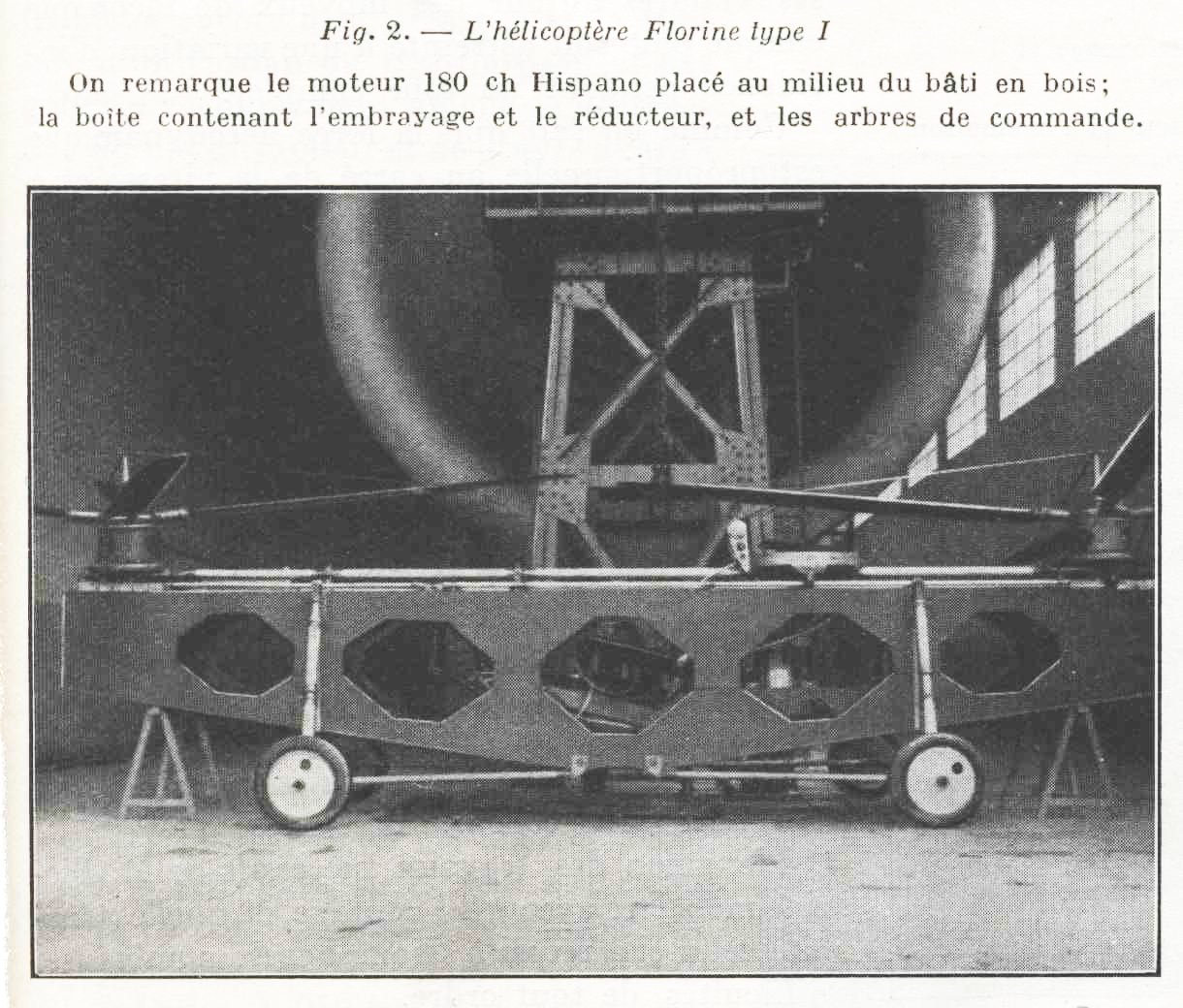
Entre le vilebrequin du moteur et les arbres de commande des hélices une boite d’engrenages à pignons d’angle munie d’un embrayage à friction permettait un rapport de réduction du nombre de tours de 6 à 1.
Les pales étaient constituées par une armature de tubes en duralumin sur laquelle sont enfilées des nervures en bois recouvertes de contreplaqué. Un manche et un volant rendaient possible la conduite de la machine en commandant l’incidence des pales soit dans le sens longitudinal, soit dans le sens latéral, Le montage de l’appareil fut terminé à la fin de 1929, mais malheureusement lors des premiers essais de violentes secousses se firent sentir dans la commande et 4 pales se détachèrent brutalement.
Comme il fut établi que la cause de cet accident était due aux vibrations de torsion et flexion combinées, les nouvelles pales furent haubanées et leur profondeur réduite à 0m20 à leur extrémité pour 0m30 à leur section maxima.
Ces modifications essayées en juillet 1930 ne furent pas pleinement satisfaisantes ; si les vibrations de flexion avaient disparu,celles de torsion manifestaient encore leur présence et la rupture d’un cardan de transmission et des griffes d’accouplement amena la destruction du nez du moteur et de graves avaries au vilebrequin, Cet accident d’accessoire ne mettait pas en cause le principe de l’hélicoptère, mais comme les crédits de construction étaient épuisés l’inventeur ne pouvait songer à réparer sa machine.
Fort heureusement le Fonds national pour la Recherche scientifique auquel on doit déjà la première ascension stratosphérique du professeur Piccard accorda à M. Florine une subvention de 60 000 fr.
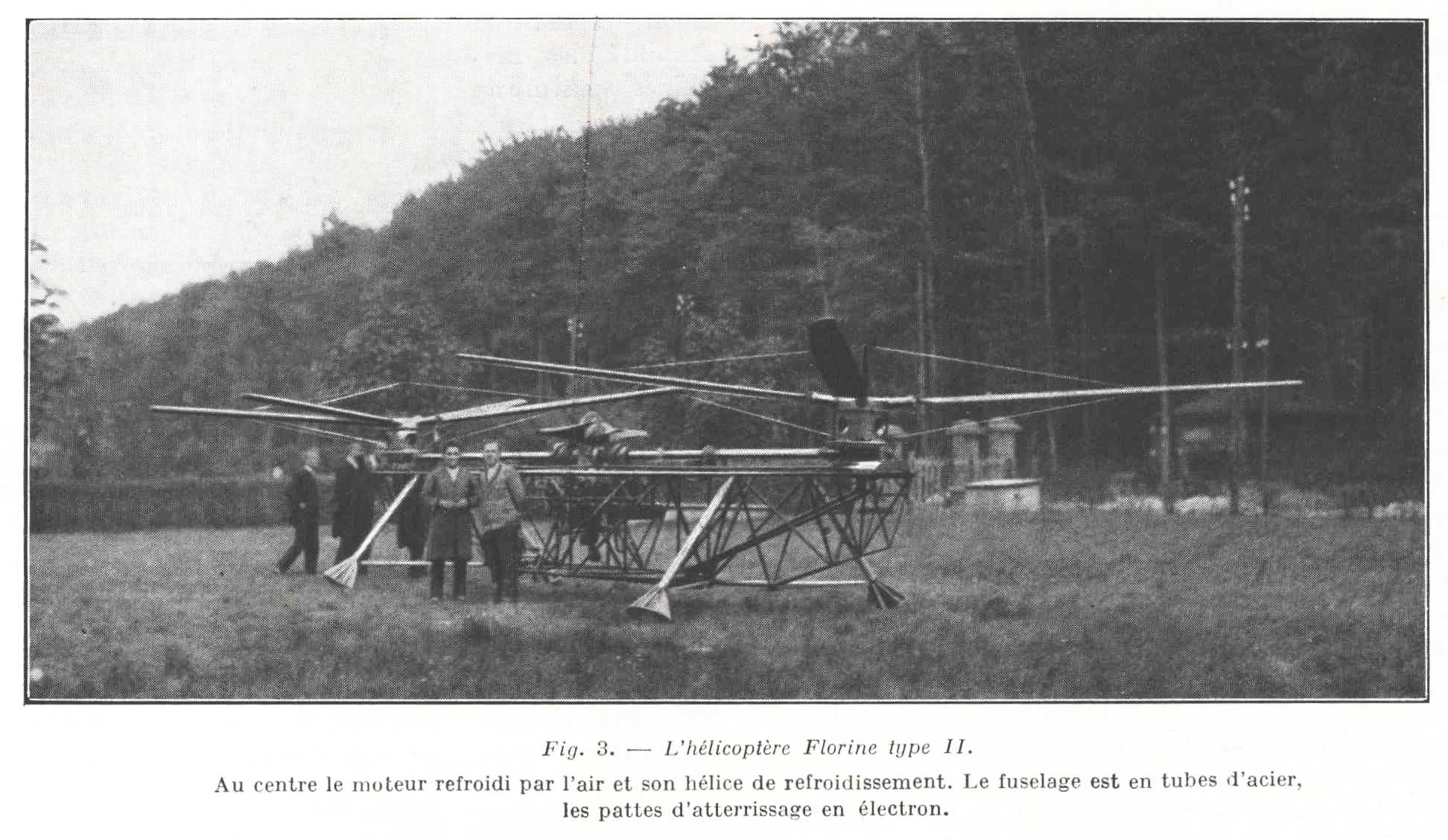
L’appareil subit alors d’importantes transformations et devint le type II (fig. 3) qui a donné des résultats intéressants. Dans un but d’allégement l’embrayage fut supprimé, le moteur 180 ch à eau remplacé par un 200 ch Renard en étoile à refroidissement par air, et un fuselage en tube d’acier soudé préféré au bâti en bois. Le poids total en ordre de vol, s’abaissa à 950 kg et une étude très serrée des accouplements souples en caoutchouc permit d’espérer la suppression des vibrations de torsion causées par la très grande longueur des arbres.
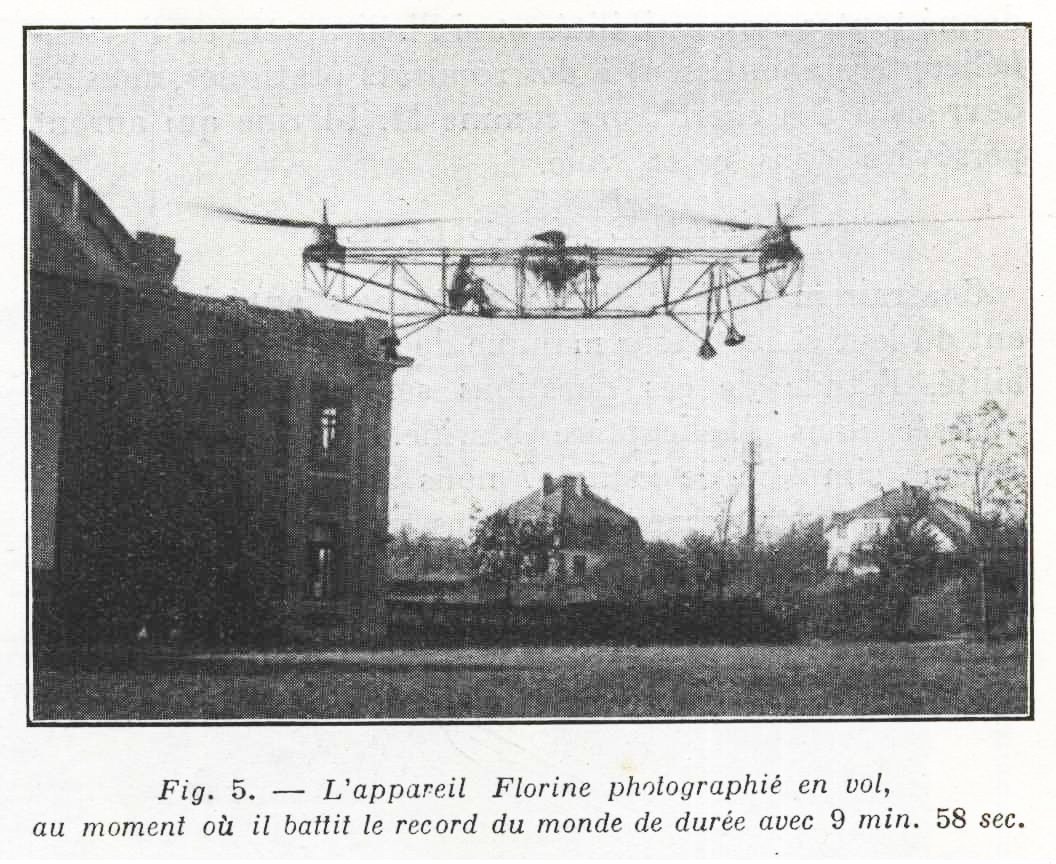
Après quelques essais préliminaires au cours de l’été dernier, le 25 octobre 1933 M. Robert Collin, ingénieur au S. T. Aé. belge qui pilotait l’appereil battait officieusement le record du monde de durée en hélicoptère en tenant l’air pendant 9 min 58 sec à environ 5 mètres de haut.
Si ces performances font sourire certains sceptiques, il n’est pas inutile de leur rappeler qu’il y a un peu plus de 25 ans un prix de 20 000 fr était offert au premier pilote d’aéroplane qui atteindrait l’altitude de 25 m ... et cependant aujourd’hui le record d’altitude dépasse 13 600 m. L’hélice sustentatrice est loin d’avoir donné toutes ses possibilités et si l’hélicoptère ou l’avion hélicoptère aboutissent à des résultats pratiques, nous les devrons à des chercheurs comme M. Florine qui auront persévéré dans cette voie.
Manœuvrabilité
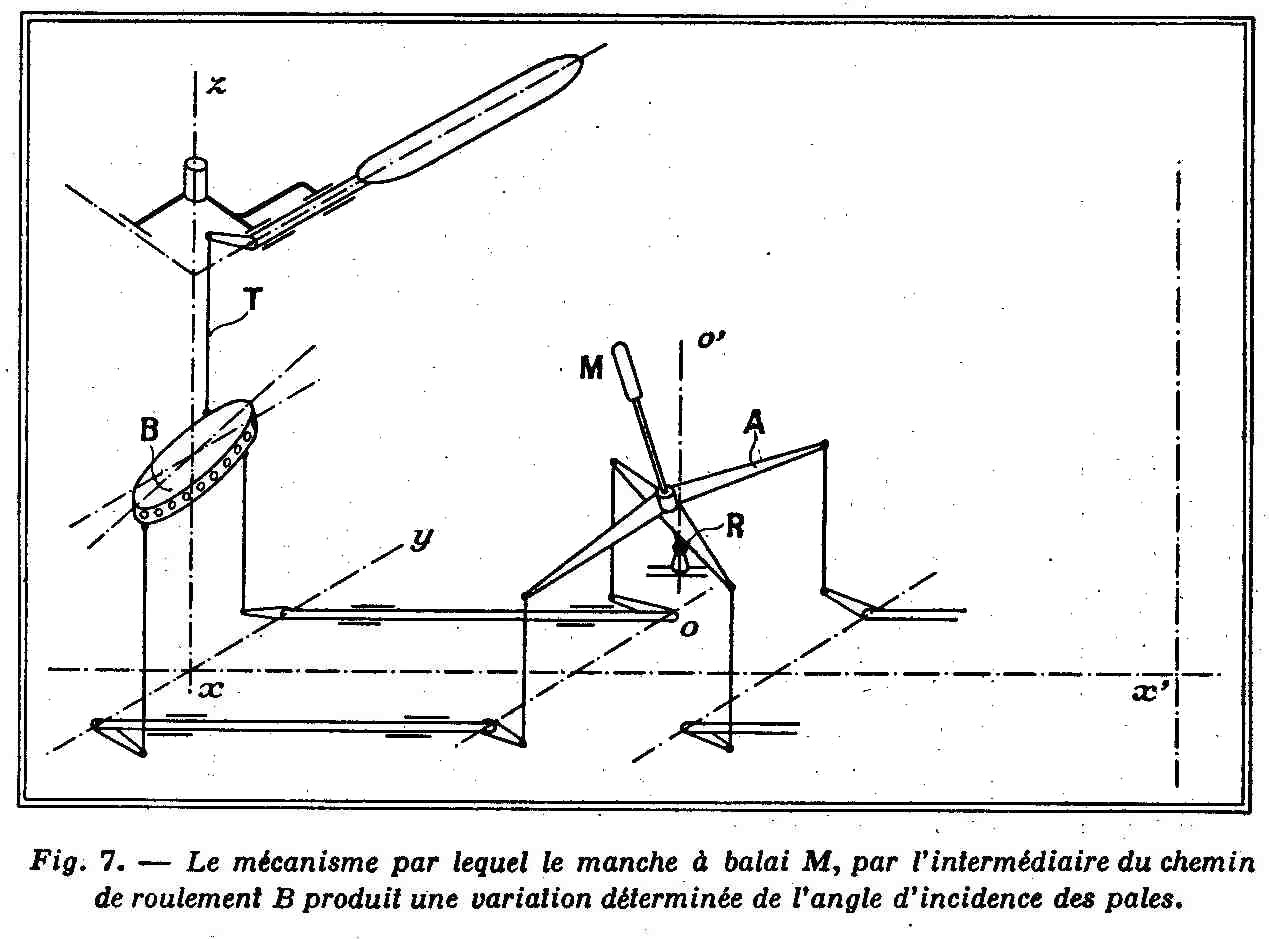
Contrairement à d’autres tentatives antérieures qui ont dû leur échec à leur manque de stabilité et de maniabilité, l’étude de ces questions semble avoir été fort poussée dans l’hélicoptère Florine. En considérant le schéma simplifié de la fig. 7 nous allons voir comment l’appareil peut tourner autour des trois axes de tangage, de roulis et de giration. Le pilote peut d’une part incliner en avant, en arrière, à droite et à gauche, le manche à balai M monté sur une rotule attachée au bâti en R et d’autre part, commander le coulissement de l’araignée A sur le tube du manche à balai vers le haut ou vers le bas.
Ce coulissement fait monter ou descendre les deux chemins de roulement tels que B par l’intermédiaire d’un jeu de leviers et biellettes - et la levée de ces chemins de roulement commande le changement de pas de toutes les pales au moyen des tiges telles que T.
La variation d’assiette autour de l’axe de tangage, montée ou descente de l’appareil, est obtenue par l’inclinaison du manche vers l’avant ou l’arrière qui produit l’augmentation du pas de l’hélice avant et la diminution de celui de l’hélice arrière.
L’inclinaison latérale suivant l’axe de roulis se fait en poussant le manche à droite ou à gauche ; cette action produit la rotation des chemins de roulement autour de l’axe longitudinal, ce qui augmente l’incidence des pales d’un côté et la diminue de l’autre.
Enfin la rotation partielle de l’appareil autour de son axe de giration (changement de cap) est produite par la modification de l’angle d’inclinaison i d’une hélice par rapport à l’autre. Ce changement d’angle détruit l’équilibre des couples de réaction que nous avons examiné au début de cette étude et fait tourner l’appareil jusqu’à ce qu’on rétablisse la même valeur de l’inclinaison (7° en moyenne) pour les deux hélices H1 et H2.
Conclusion
Nous espérons que ce rapide exposé a montré que, tant au point de vue des principes nouveaux appliqués qu’au sujet des solutions mécaniques minutieusement éprouvées, l’hélicoptère Florine est un appareil d’avenir.
Rendons hommage à la ténacité de son inventeur et souhaitons que les performances très encourageantes enregistrées l’an dernier soient encore améliorées, puisque l’appareil le permet certainement.
