C’est une belle œuvre que celle de rendre moins lourde a nos mutilés de la guerre leur glorieuse infirmité. Il y a là un vaste champ d’action pour nos inventeurs et l’on peut y signaler déjà beaucoup d’initiatives heureuses. Parmi celles-ci, il convient de mentionner celle de M. Despinasse, qui vient de réaliser une main artificielle automatique dont nous avons pu constater le bon fonctionnement.
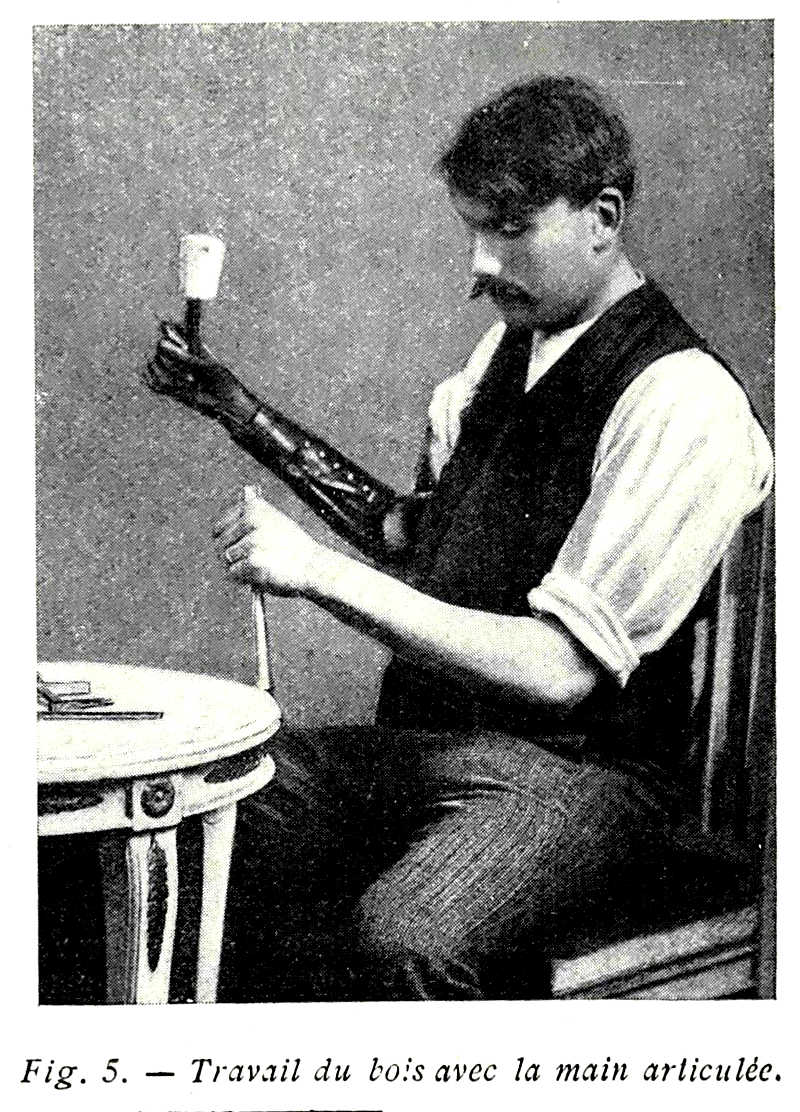
Le mutile muni de celle main la fait travailler par de simples mouvements du bras ou de l’épaule, il peut lui faire saisir un objet de forme quelconque, les doigts de la main automatique épousent d’eux-mêmes le contour de l’objet et le serrent énergiquement presque comme le ferait une main véritable.
La main artificielle peut donc tenir et manier un outil, porter un fardeau ; nous avons vu un mutilé porter ainsi de son bras amputé un poids de 10 à 12 kg, et cette main artificielle ne pèse pas plus de 550 g.
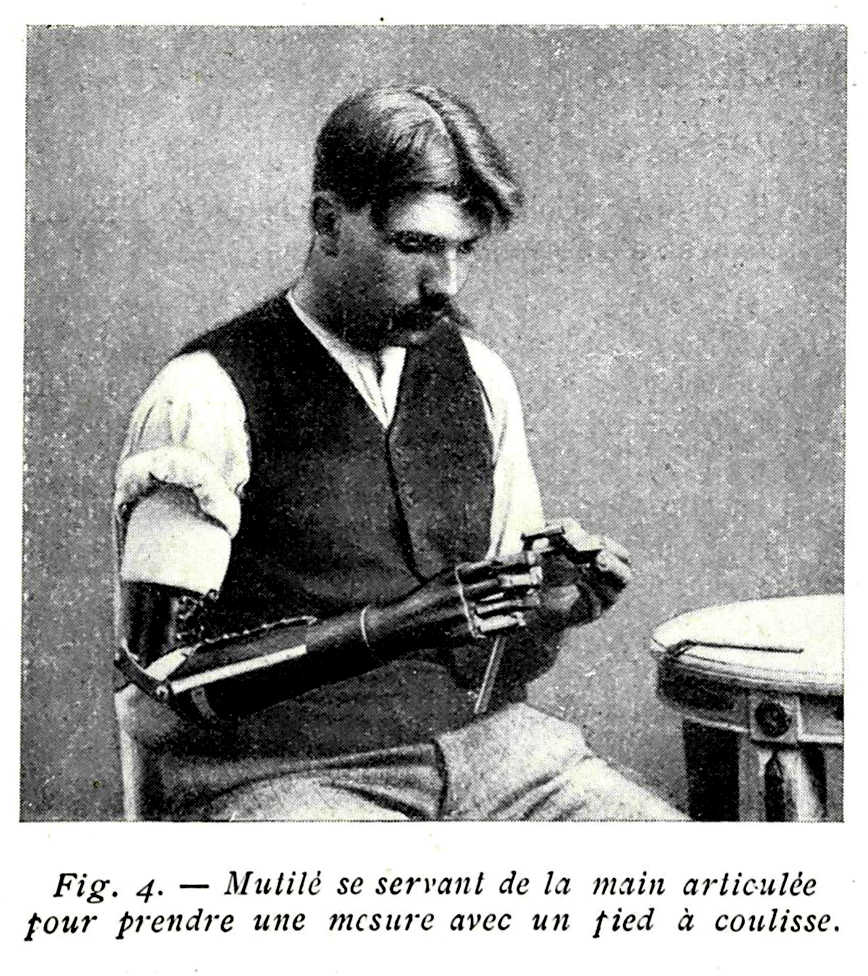
La caractéristique essentielle de la main imaginée par M. Despinasse, c’est que chaque doigt peut poursuivre sa course de préhension indépendamment des autres bien qu’il n’y ait pour commander le mouvement de l’ensemble qu’un tendeur unique, manœuvré par le bras ou l’épaule du mutile. De plus les doigts peuvent à volonté être bloqués à un moment quelconque de leur course.
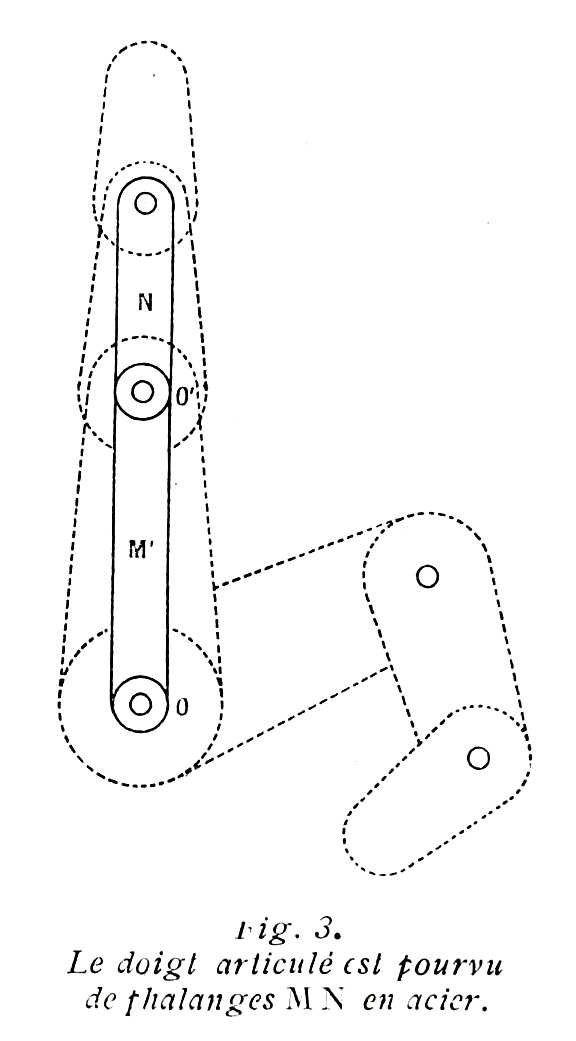
Examinons de plus près l’anatomie de cette main : chaque doigt, sauf le pouce, a ses trois phalanges articulées ; les os y sont représentés par 2 lames d’acier M et N (fig. 3) pouvant pivoter respectivement autour des axes O et O’ ; elles sont placées à l’intérieur de phalanges en bois dont elles sont solidaires.
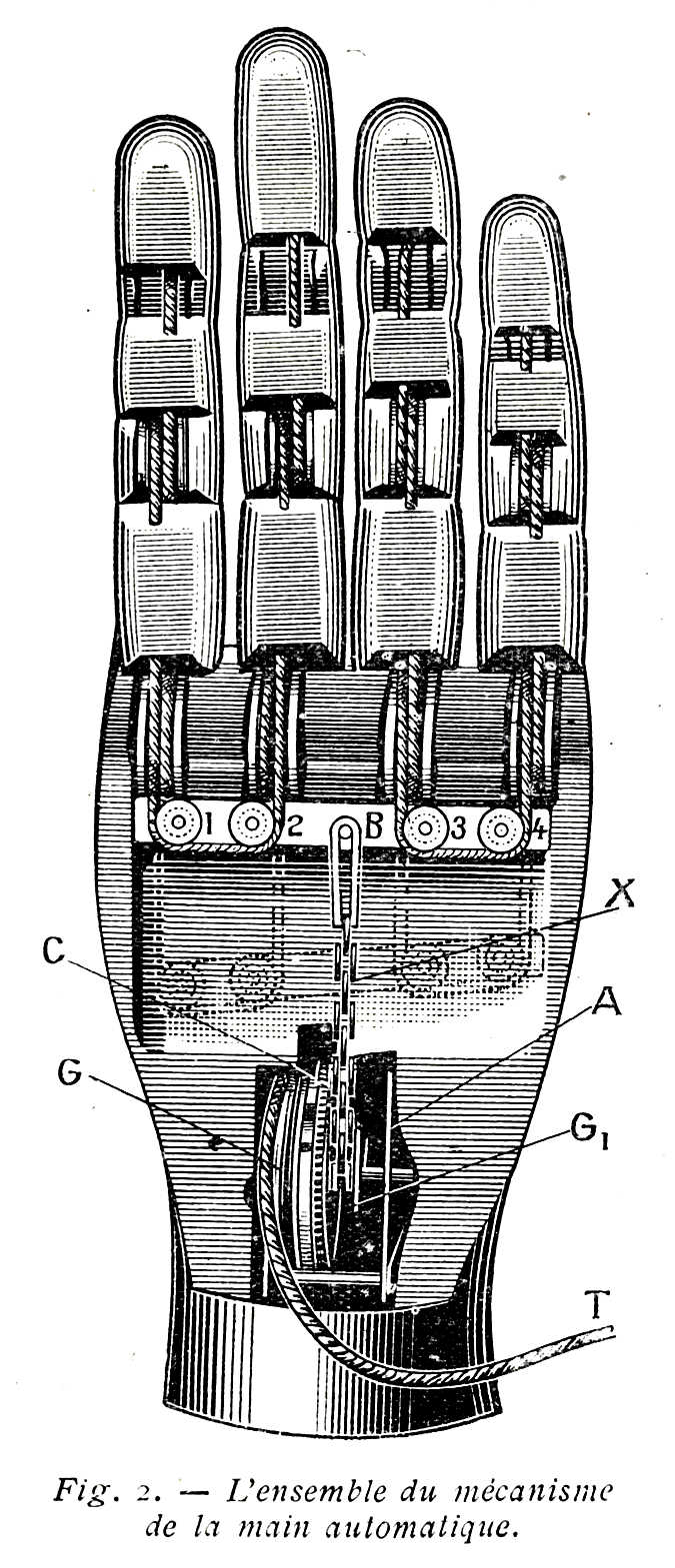
Le mouvement de ces 2 lames d’acier, c’est-à-dire le mouvement du doigt, s’obtient au moyen de deux poulies R, R’, montées respectivement sur les axes O et O’ ; sur ces poulies s’enroule un fil tendeur P en corde à boyau, dont l’une des extrémités est fixée en S à la phalange terminale, dont l’autre bout, après s’être enroulé sur les poulies R et R’, vient s’enrouler sur la poulie B1 (fig. 1) montée sur une barre B, dont nous allons voir le rôle.
Si l’on tire sur le fil, les articulations joueront et le doigt se pliera comme le montre la figure 3.
Si nous regardons maintenant l’ensemble de la main, laissant de côté le pouce qui n’est pas articulé (fig.2), nous voyons le fil tendeur de l’index s’enrouler sur la poulie 1 fixée à la barre B, et là venir s’enrouler sur la poulie 2 fixée à la même barre, gagner les articulations du médius, et venir s’attacher à la phalange supérieure de celui-ci. Pareillement, l’annulaire et le petit doigt sont commandés par un même fil qui s’enroule sur les poulies 3 et 4.
C’est la barre B qui communique aux cordes des doigts la tension qui les met en mouvement. Elle-même est commandée par le tendeur unique T, attaché au bras ou à l’épaule de l’amputé. Ce tendeur, lorsqu’il subit une traction met en mouvement le tambour G qui entraîne à son tour le galet G1 celui-ci en tournant enroule la chaînette X, et celle-ci attachée à la barre B exerce sur elle une traction qui se transmet aux 4 doigts et leur fait prendre une position de préhension ; tant qu’ils ne rencontrent pas d’obstacle les doigts continuent à se serrer en même temps que la barre B s’abaisse. Mais que l’un des doigts vienne à rencontrer un obstacle, qui l’empêche de continuer à se refermer, la corde qui tend le doigt en question, roule sur les poulies des articulations, tandis que les 5 autres cordes continuent à exercer leur effort de traction par l’intermédiaire de la barre B qui a pris une position oblique, un cliquet spécial C bloque automatiquement la chaînette X et par suite les doigts dans toutes les positions.
Lorsqu’on veut lâcher, on tire à nouveau sur le tendeur T ; le galet G1, qui s’est libéré du tambour G, des qu’on a cessé la traction, est amené à sa position de fin de course ; une came qu’il porte soulève le cliquet de blocage et les articulations sont alors toutes ramenées à leur position normale par les ressorts de rappel y et le tendeur T dissimulés dans chaque doigt (fig. 1).
La main imaginée par M. Despinasse est, on le voit, très ingénieuse et néanmoins d’une construction très simple ; son maniement ne l’est pas moins. Elle semble bien réaliser un appareil réellement pratique, apte à rendre de grands services à de nombreux mutilés.
R. Villers