

PENDANT la guerre, les inventeurs ont fait preuve d’une ingéniosité rare, et de nombreux moyens de défense, plus ou moins utilisables, ont été imaginés. La détermination pratique de l’emplacement d’un sous-marin ennemi fut pendant quelque temps un problème ardu. On parvint néanmoins à le résoudre de façon très satisfaisante.
Nous ne parlerons pas ici des procédés employés par les navires spécialement affectés à la chasse des sous-marins, mais de deux brevets anglais qui nous ont semblé intéressants.
Premier brevet. — La proximité de corps métalliques tels que des sous-marins est décelée au moyen d’un électro-aimant alimenté par du courant alternatif, de préférence d’un générateur d’audio-fréquence, et d’une bobine de recherche située en dehors du champ actif de l’aimant. L’aimant est placé, par exemple, à la proue d’un navire avec son axe horizontal, et la bobine de forme toroïdale avec son axe vertical, à la poupe. On s’arrange ainsi pour qu’il n’y ait pas dans la self de courants induits par l’électro-aimant.
La proximité d’un sous-marin, par sa masse métallique, redresse pour ainsi dire les lignes de force du champ magnétique de l’aimant et donne naissance dans la bobine à des courants de la même fréquence que le générateur, la présence de ces courants étant décelée au moyen d’un récepteur téléphonique.
L’électro est alimenté avec un générateur de courant alternatif et tout le circuit est synchronisé à la fréquence de celui-ci. La self de recherche est connectée à un audion ou à tout autre amplificateur et le courant amplifié passe dans un récepteur téléphonique ; pour obtenir plus de sensibilité, un résonateur du type Helmholtz peut être ajouté à une distance réglable du récepteur et les sons sont alors perçus à l’aide du tube stéthoscope. Pour, au montage éliminer les courants induits de la bobine, celle-ci est inclinée sur son axe horizontal jusqu’à la position pour laquelle les sons perçus sont minimum ; on la fixe là définitivement. On produit alors des courants alternatifs destinés à neutraliser ceux qui pourraient subsister.
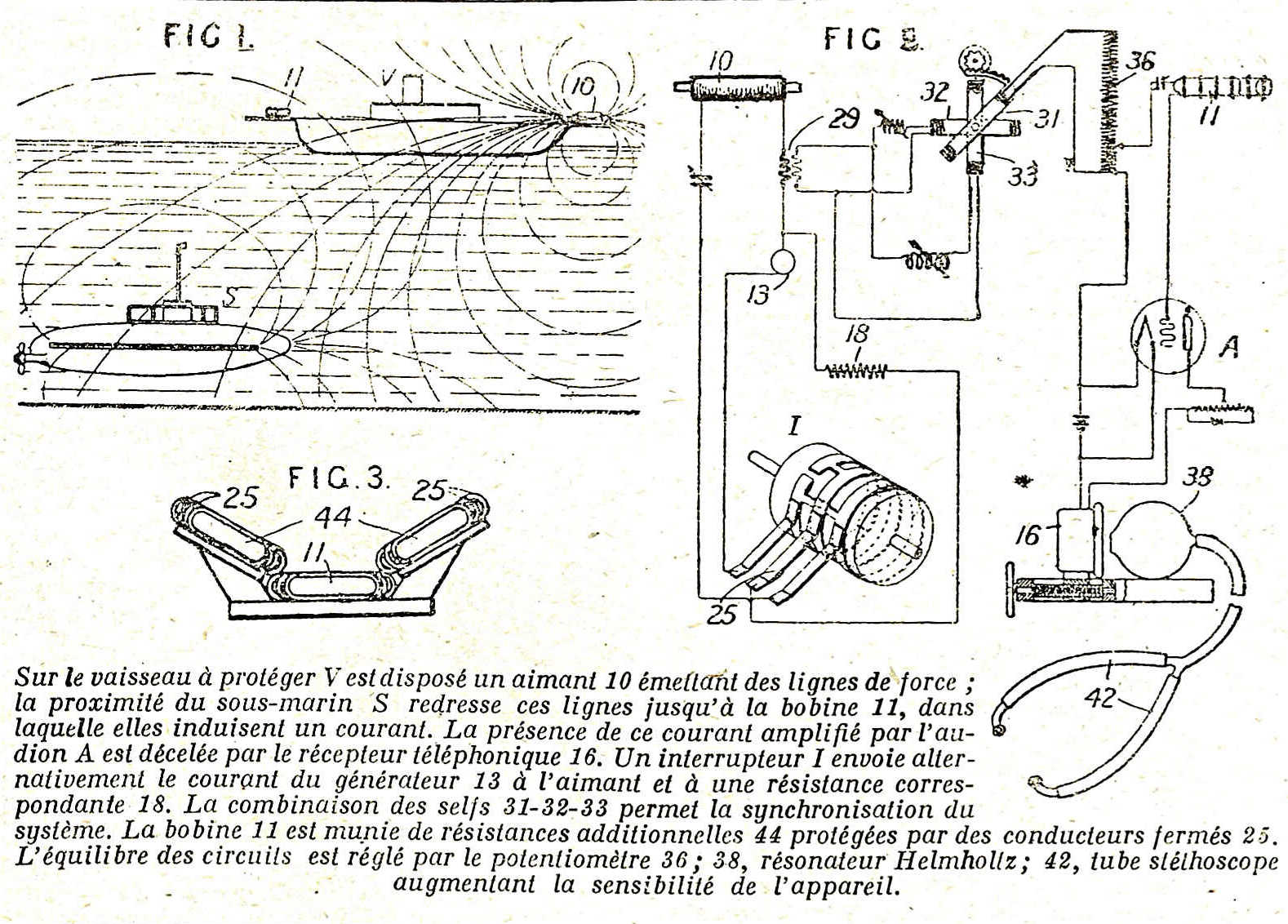
Ainsi qu’on le voit dans la figure n°2, les bobines en croix montées en parallèle sont reliées au travers du transformateur au circuit de l’électro-aimant. Le courant, à la fréquence du générateur, est donc induit dans la self 31 qui peut être ajustée angulairement, en raison de la concordance de phases, et le courant est superposé dans la bobine au travers d’un potentiomètre. Pour réduire au minimum les désordres causés par les moindres variations de position de la bobine en raison des mouvements du bateau, celle-ci est protégée par des conducteurs fermés. Pour rendre le son du générateur distinct des bruits pouvant provenir d’autres sources, une combinaison permet d’alimenter l’électro par intermittences, ce qui rend les sons plus reconnaissables. Un interrupteur circulaire est installé à cet effet : il connecte l’alternateur à l’aimant et une résistance correspondante, la charge du générateur étant toujours constante.
Le côté du vaisseau duquel le sous-marin se trouve est déterminé par les bobines additionnelles disposées de part et d’autre de la bobine de recherche, le courant le plus fort passant naturellement par la bobine la plus rapprochée du corps métallique, un interrupteur permettant de connecter successivement et séparément chacune des trois bobines au récepteur.
Cette invention est particulièrement ingénieuse, par cela même qu’elle se base sur un principe électro-magnétique excessivement simple. Son installation et son maniement faciles permettent son emploi à bord de simples bateaux de commerce.
Deuxième brevet. — Dans cette méthode purement acoustique, toutes les précautions ont été prises pour que les sons enregistrés fussent immédiatement entendus et ne pussent être confondus avec ceux du navire. On a, à cet effet, placé le microphone à une certaine distance du bateau, et cela d’une façon très ingénieuse. Un détecteur microphonique est adapté à un flotteur remorqué par le bateau à protéger, de telle façon qu’il puisse rester pratiquement au repos pendant que le bateau continue sa route. Le câble est enroulé à un treuil qui peut, lorsque l’on désire prendre une observation, en laisser filer une certaine longueur suffisamment rapide pour que le flotteur reste en place.
Le détecteur peut être actionné par un moteur à ressort situé dans le corps du flotteur, par la commande d’un arbre ; des pales servent à remonter le moteur. De chaque côté du flotteur, des ailerons tendent à le maintenir stationnaire lorsqu’on cesse de tirer sur le câble ; ils offrent peu de résistance lorsque le tout est remorqué.
L’orientation du détecteur peut être observée du bateau toueur au moyen de bras signaux ou, la nuit, de lampes électriques.
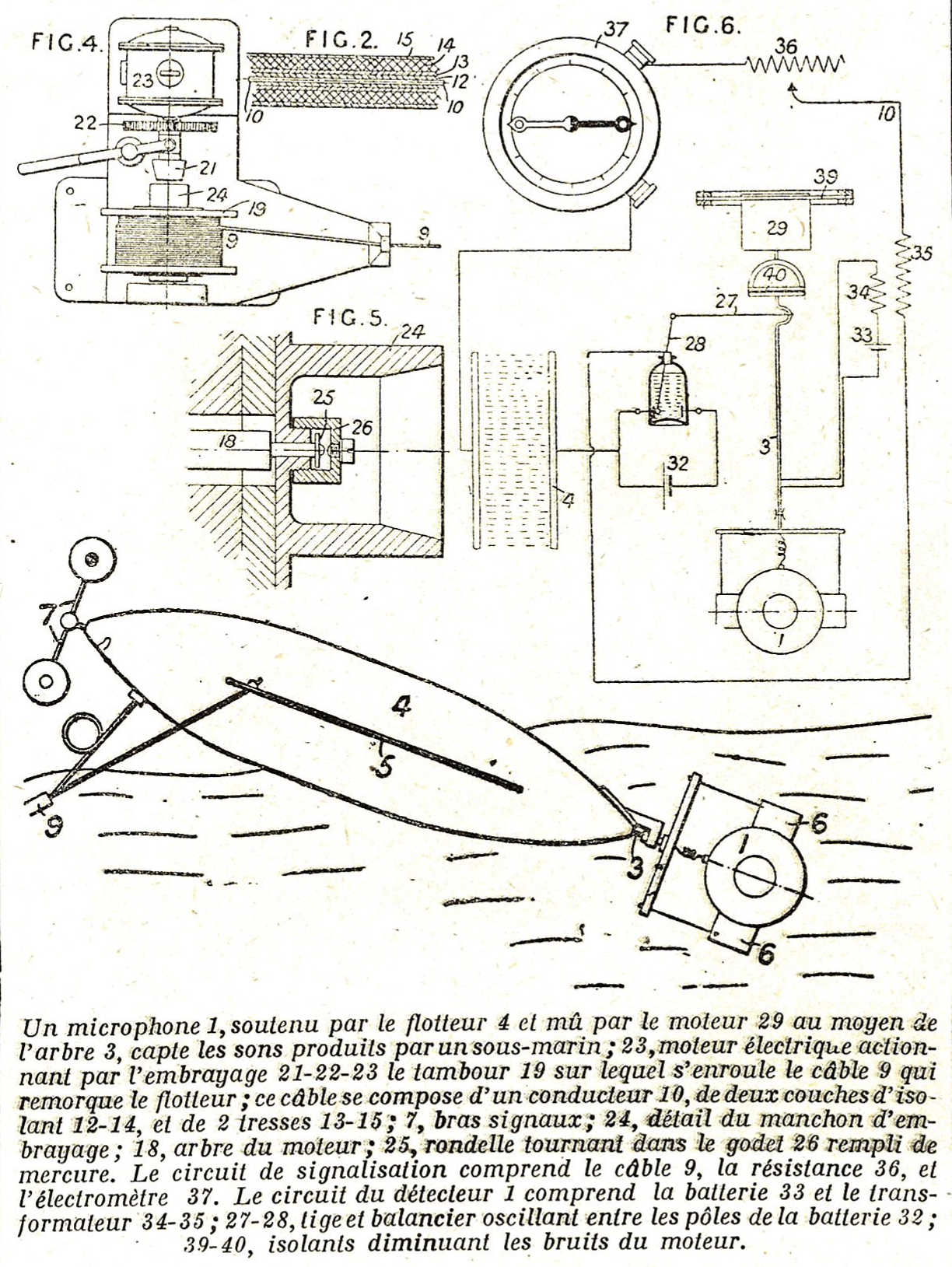
Le câble au moyen duquel les connexions sont faites, se compose d’un conducteur en cuivre recouvert d’un isolant et d’une tresse enveloppés d’une couche de caoutchouc spongieux protégée par une seconde tresse. Le treuil sur lequel est enroulé ce câble comprend un tambour qui peut être, grâce à un embrayage à main, relié au moteur électrique dont la vitesse est réduite par des pignons. Pour que la connexion électrique soit bonne sans avoir à employer d’isolants, le mandrin porte un manchon contenant du mercure dans lequel tourne une rondelle de cuivre fixée à l’extrémité de l’arbre.
Dans le but d’indiquer électriquement l’orientation du détecteur, la partie coudée de l’arbre par laquelle le moteur actionne celui-ci est reliée par une tige à un balancier qui oscille entre des électrodes immergées dans une solution de sulfate de cuivre en série avec une batterie. Le circuit de signalisation comprend le câble, la résistance, l’électromètre sur le bateau, la mer et le flotteur, alors que le microphone est dans le circuit différent formé par la batterie couplée sur le transformateur sur le circuit du câble. Quand le moteur actionne le détecteur, l’aiguille de l’électromètre oscille, la position angulaire du détecteur étant donnée par la lecture d’une moitié de l’aiguille lorsque celle-ci tourne de gauche à droite, et par l’autre moitié lorsqu’elle tourne dans l’autre sens. De façon à empêcher le bruit du moteur d’impressionner le microphone, on le suspend par une feuille de caoutchouc et son axe est relié à l’arbre au moyen d’un isolant.
Les Américains se servirent de perfectionnements de ce principe pour se garer des dangereux torpillages.
Ch. Mayer